Mr_VisionMaster Lv.3
12
文章
2
案例
10
回答
99
获赞
62
粉丝
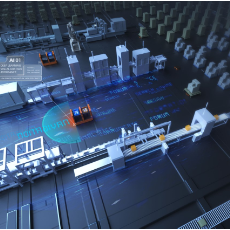
【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目
使用2D相机+VM实现复合机器人3D上下料的一指禅
1855 6 2 2024-05-30 VM算法平台
【共享学习】圆环展开算法剖析与硬核实战
顾名思义,圆环展开是指将指定圆环展开为矩形。本文将详细介绍圆环展开的算法原理及背后实现。
1379 6 1 2023-09-10 VM算法平台
【共享学习】关于深度学习显卡推理那些事儿
深度学习是机器视觉领域越来越火的方向,各家卯足干劲奔赴AI,以至于逢年过节,机器视觉从业者见面寒暄第一句多半都是:“今天你打标了吗?”针对机器视觉深度学习显卡推理过程及常见问题点,结合个人多年经验做出解答。
1438 3 2 2023-09-07 知识普及
【共享学习】关于存图那些事儿
存图是机器视觉领域绕不过去的环节,逢年过节,机器视觉从业者见面寒暄第一句多半都是:“今天你家设备丢图了吗?”针对机器视觉存图原理及常见问题点,结合个人多年经验做出解答。
1300 3 3 2023-09-07 知识普及
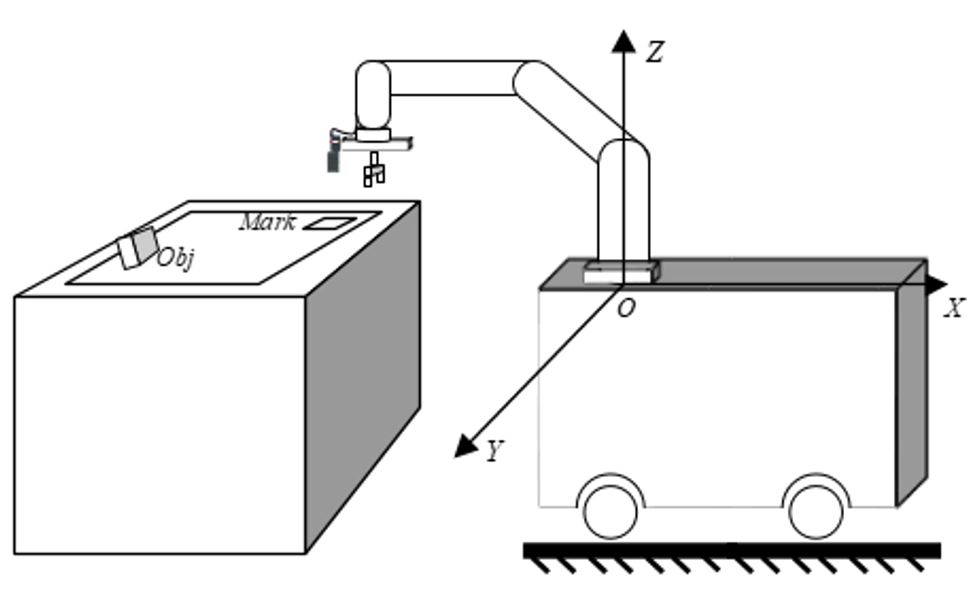
2D相机也能做3D偏移抓取?VM轻松搞定!
本文介绍如何使用2D相机和VM,实现AGV复合机器人的3D偏移抓取。在实验室测试环境下,物料角度变化±15度,3D偏移抓取精度约为±1mm。
1904 7 6 2023-08-31 VM算法平台
VM开发模式介绍
VisionMaster支持多种开发模式,包括:无需编程的快速应用模式,低代码开发的集成开发模式,以及面向对象的算子开发模式,覆盖开发/应用/售后族群,开发更轻松,选择更灵活。本文将介绍实际项目中,选择何种开发模式是合适的。
2364 4 2023-06-17 VM算法平台
自定义算法模块打印日志的方法
自研算法模块如何打印日志,从而协助定位问题点?
1188 4 2023-06-17 VM算法平台
自定义算法模块添加多幅图像输入的方法
自定义算法模块如何添加多幅图像输入,从而扩展到双目视觉算法领域?
2026 6 1 2022-12-19 VM算法平台
自定义算法模块点集输入、输出实现方法
自定义算法模块如何获取输入点集、输出点集,从而扩展到几何基元拟合等算法领域?
1958 3 1 2022-12-19 VM算法平台
自定义算法模块输出和显示矩形检测框的方法
自定义算法模块如何输出和显示矩形检测框,从而扩展到深度学习目标检测等算法领域?
2096 4 2022-12-19 VM算法平台
自定义算法模块获取输入直线的方法
自定义算法模块如何获取输入直线,从而扩展到直线边缘缺陷检测等算法领域?
1641 2 2022-12-19 VM算法平台
VM4.2二次开发环境配置方法(入门必看)
详细介绍基于C#、C++进行VM4.2(维护版)平台SDK开发环境配置。
8373 15 10 2022-05-23 二次开发
您正在使用的浏览器版本过低,请升级最新版本以获得更好的体验。
推荐使用以下浏览器










 浙公网安备 33010802013223号
浙公网安备 33010802013223号