- 1880
- 0
- 分享
- 2023-09-10 11:40
圆环展开算法剖析与硬核实战
友情提醒:转载或合理使用本文提出的算法,请务必注明出处,也是对作者的认可与尊重。
什么是圆环展开
顾名思义,将指定圆环展开为矩形。
几何基础
如下图所示,圆环内径为r,外径为R,圆心为O。
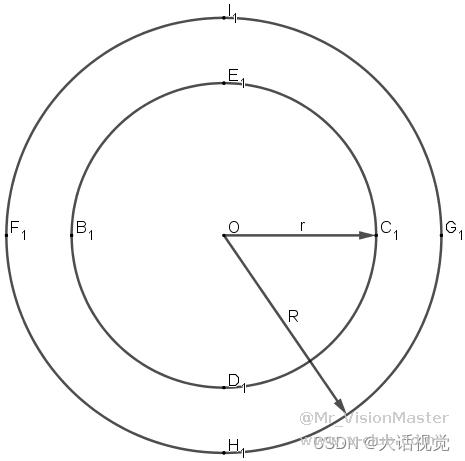
设圆心O坐标为(x0,y0),射线PO到射线OC1的夹角为θ,由几何知识可知:
内圆上点P的坐标(x,y)为:
x = x0 + r * cosθ
y = y0 - r * sinθ
外圆上点P’的坐标(x’,y’)为:
x’ = x0 + R * cosθ
y’ = y0 - R * sinθ
同理可知,若点P落在以O为圆心,半径为Radius(r≤Radius≤R)的圆周上,则其坐标(X,Y)为:
X = x0 + Radius * cosθ
Y = y0 - Radius * sinθ
原理推导
首先要确定展开矩形图像的宽和高。在此,我们不假思索地给出以下结论:
DstWidth = (r + R) * 2π * 0.5
DstHeight = R - r
然后,要确定展开矩形图像中,第i行第j列像素点的灰度值。
假设上图中,点C1到G1连线方向为圆环展开的起始方向,由【原理推导】小节结论可知,展开矩形图像中,第i行第j列像素点对应原图像中的坐标为:
x = x0 + (r + i) * cos(j * 2π / DstWidth)
y = y0 - (r + i) * sin(j * 2π / DstWidth)
显然,展开矩形图像中,第i行第j列像素点对应原图像中的像素坐标不为整数,因此需要采用图像插值算法。最常用的图像插值算法包括最近邻插值和双线性插值,后者插值效果更好,但耗时也相对更长。
- 最近邻插值
最近邻插值示意图如下图所示。
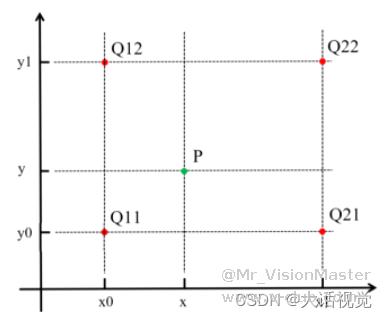
如上图所示,(x0,y0)、(x0,y1)、(x1,y0)、(x1,y1)都是原图像上的坐标点,灰度值分别对应为Q11、Q12、Q21、Q22。而灰度值未知的插值点(x, y),根据最近邻插值方法的约束,其与坐标点(x0, y0)位置最接近 (即位于(x0,y0)的邻域内),故插值点(x, y)的灰度值等于Q11。 - 双线性插值
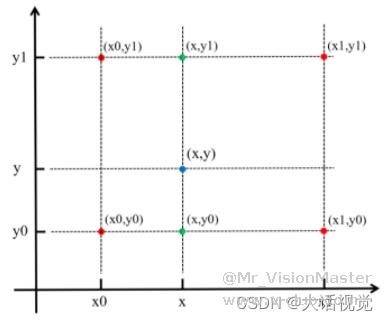
双线性插值示意图如下图所示。
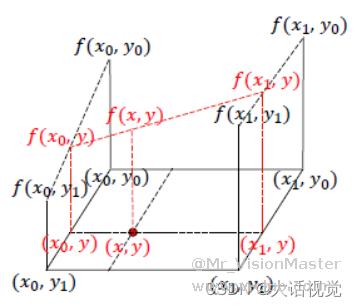
由上图可知,二维图像的双线性插值,需要经过三次一阶线性插值。
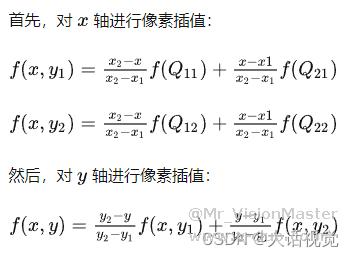
最终插值计算公式为:

核心代码
// 双线性插值
unsigned char CAlgorithmModule::BilinearInterpolation(float x, float y, MVDSDK_BASE_MODU_INPUT* modu_input, int width, int height)
{
x = (x < 0) ? 0 : x;
y = (y < 0) ? 0 : y;
x = (x > width) ? width : x;
y = (y > height) ? height : y;
int x1 = floor(x);
int x2 = ceil(x);
int y1 = floor(y);
int y2 = ceil(y);
int pos1 = y1 * width + x1;
int pos2 = y1 * width + x2;
int pos3 = y2 * width + x1;
int pos4 = y2 * width + x2;
unsigned char* pImgData = modu_input->pImageInObj->GetImageData(0)->pData;
unsigned char grayValue = pImgData[pos1] * (x2 - x) * (y2 - y) + pImgData[pos2] * (x - x1) * (y2 - y) + pImgData[pos3] * (x2 - x) * (y - y1) + pImgData[pos4] * (x - x1) * (y - y1);
return grayValue;
}
运行结果对比
采集多幅图像,分别采用本文提出的算法、VisionMaster(国内最领先的算法平台,简称VM)进行圆环展开。
VM圆环展开:

本文圆环展开:

可以看出,采用本文方法开发的圆环展开模块运行效果与VM基本一致。
作者衷心希望国产品牌能够扬名世界,而我们每个人亦能为国产产品做出自己的贡献与创新,不断突破国外垄断和技术壁垒。



 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号