2D相机也能做3D偏移抓取?VM轻松搞定!
- 1904
- 5
- 分享
- 2023-08-31 11:02
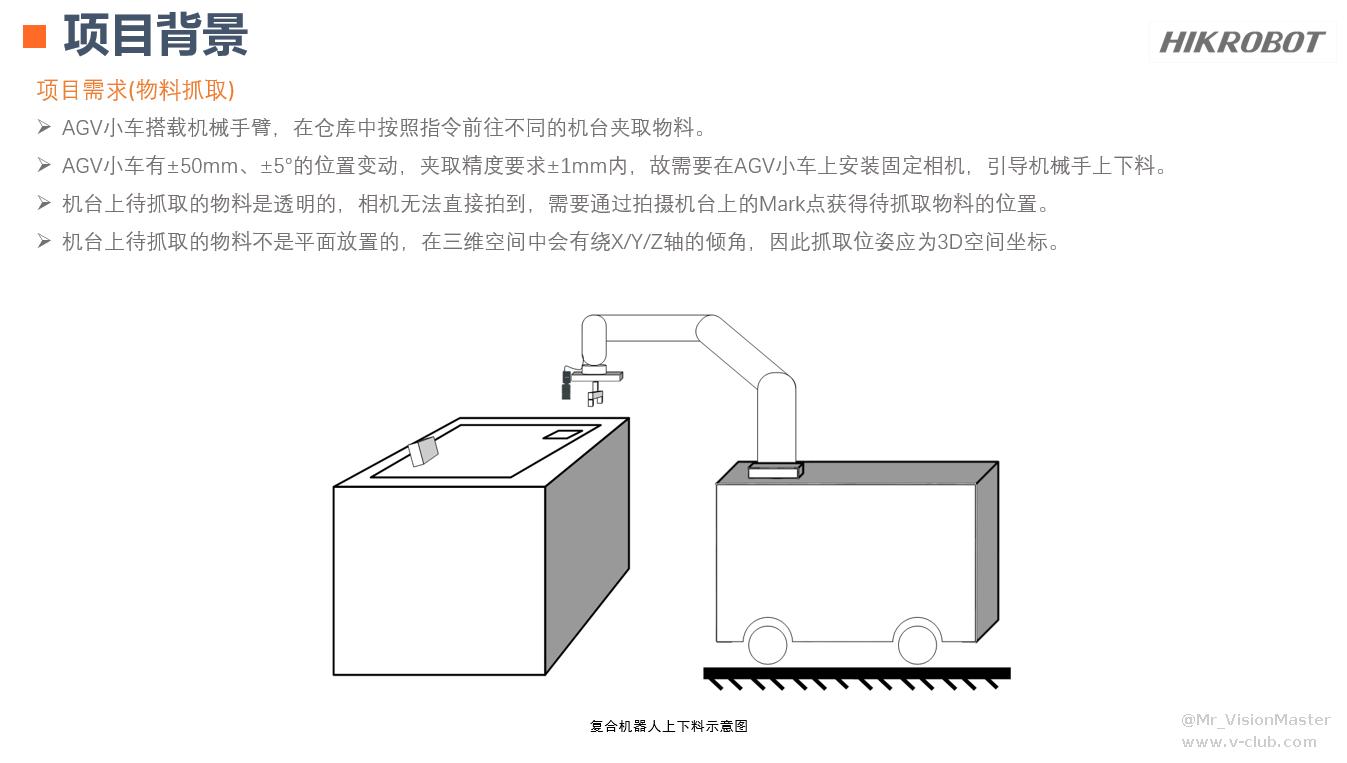
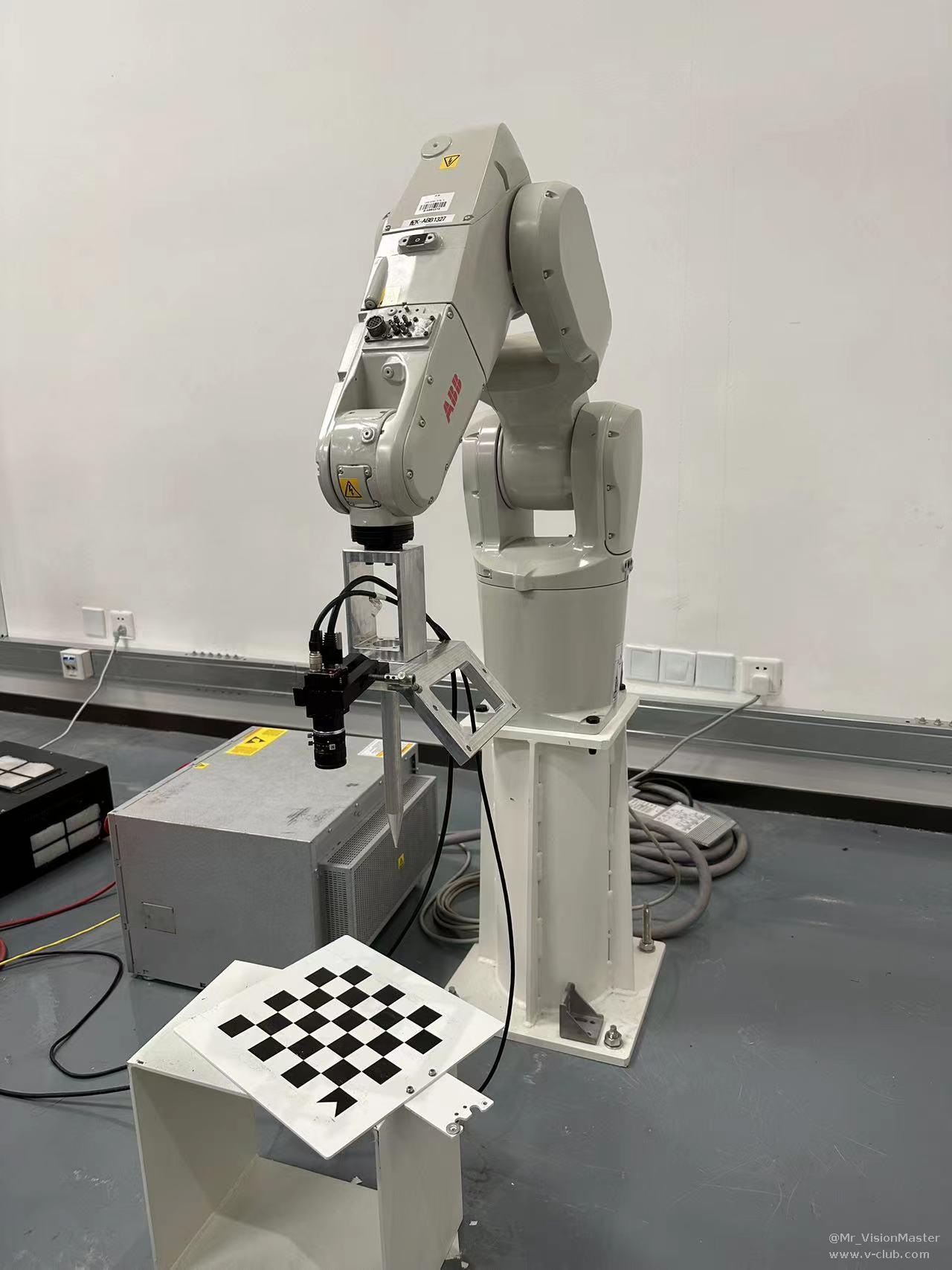
本文介绍如何使用2D相机和VM,实现AGV复合机器人的3D偏移抓取。在实验室测试环境下,物料角度变化±15度,3D偏移抓取精度约为±1mm。
首先介绍项目背景。
接下来介绍求解思路。
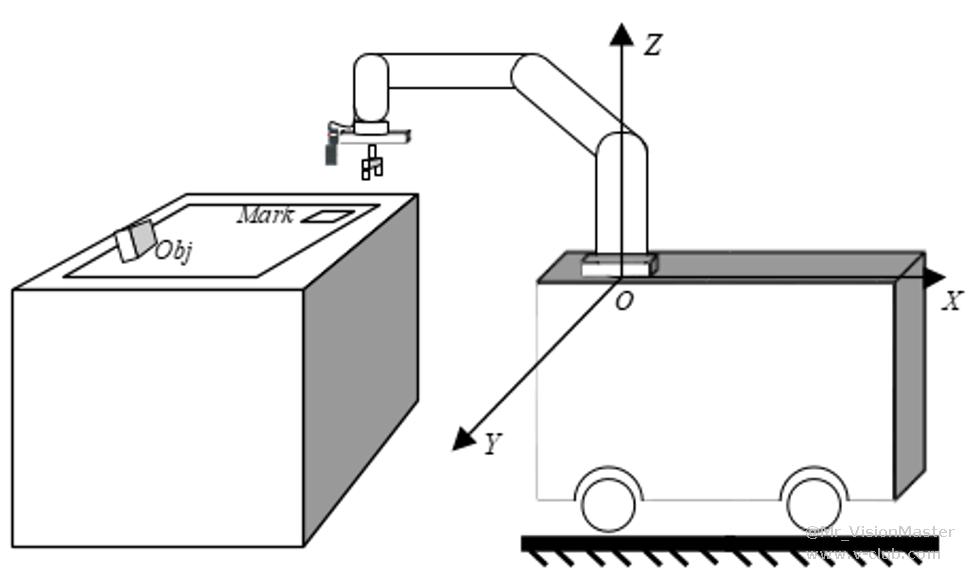
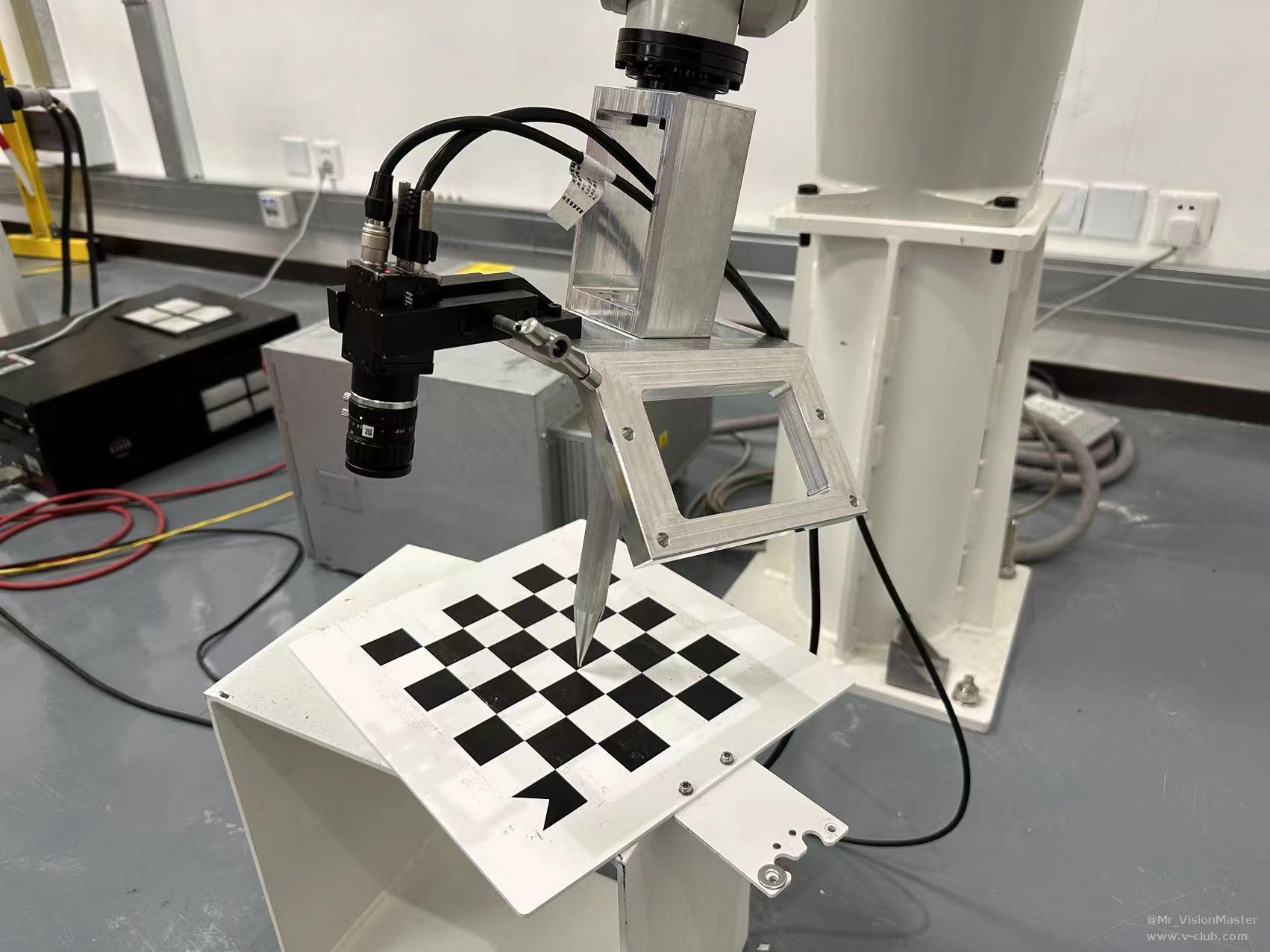
标定阶段:AGV小车携带机器人及其上面的相机到达机台前拍照,机械手与相机采用九点手眼标定实现坐标系转换。
示教阶段:相机拍摄Mark点像素坐标作为基准像素坐标Pm,机器人示教Mark点记录此时的3D坐标P1,机器人抓取示教物料Obj记录此时的3D坐标P2。
生产阶段:相机拍摄Mark点像素坐标作为运行像素坐标Pc,根据标定矩阵M,基准像素坐标Pm,运行像素坐标Pc,Mark点示教坐标P1,Obj抓取示教坐标P2,计算Obj抓取运行位姿P。
接下来介绍解决方案。
标定阶段:使用平移旋转标定模块。
生产阶段:使用单点抓取模块和3D位姿估计模块。前者用于计算Mark点运行位坐标Pcw(机器人物理坐标系),后者用于根据P1、P2和Pcw,计算物料抓取运行位姿P。
使用VM搭建标定方案如下,采用TCP通讯实现自动触发标定。
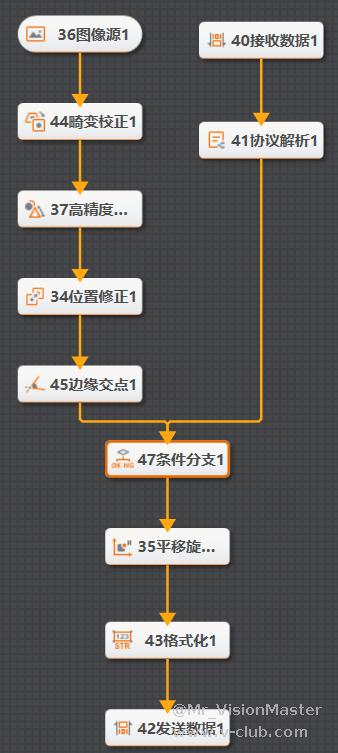
使用VM搭建生产方案如下。

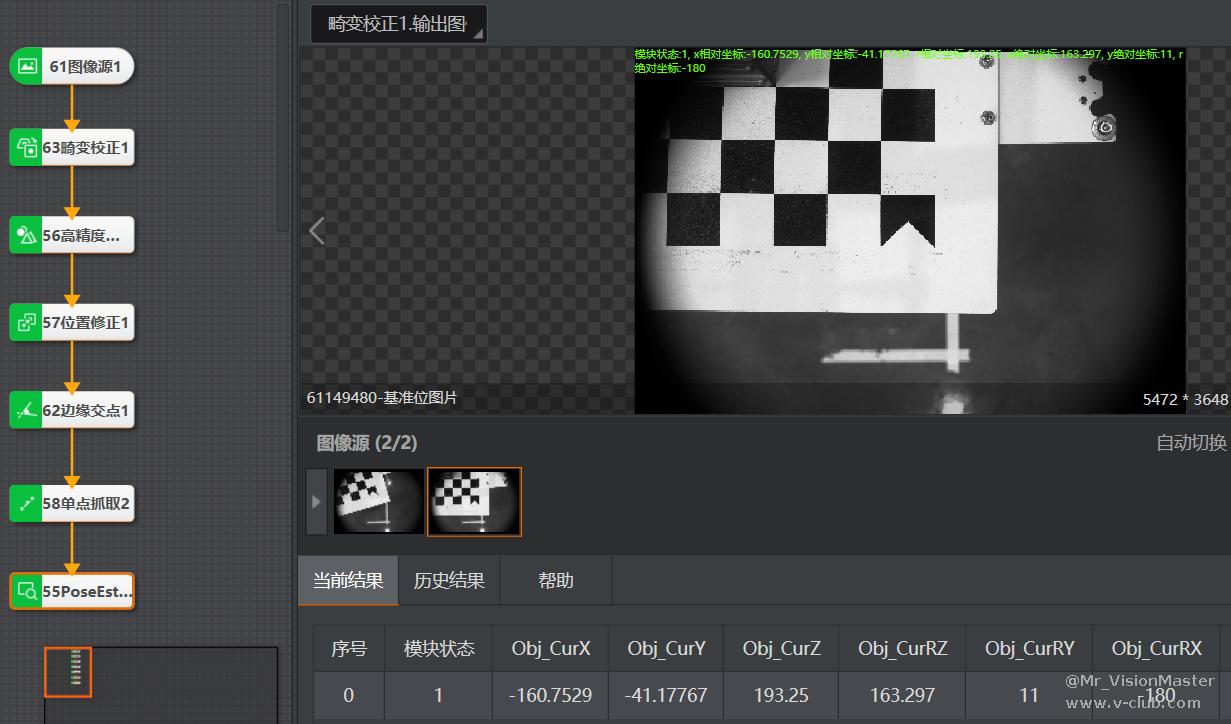
3D偏移抓取位姿估计结果如下。
最后,一起看看真实环境测试效果吧。
机器人在示教拍照位拍照。
机器人接收VM发送的3D偏移抓取位姿坐标(内旋ZYX欧拉角形式),到达抓取位。
抓取成功,精度还挺高😃
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇

下一篇

评论请先登录 登录
全部评论 5

- 1

相关阅读
 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号