【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目
- 3298
- 3
- 分享
- 2024-05-30 10:10
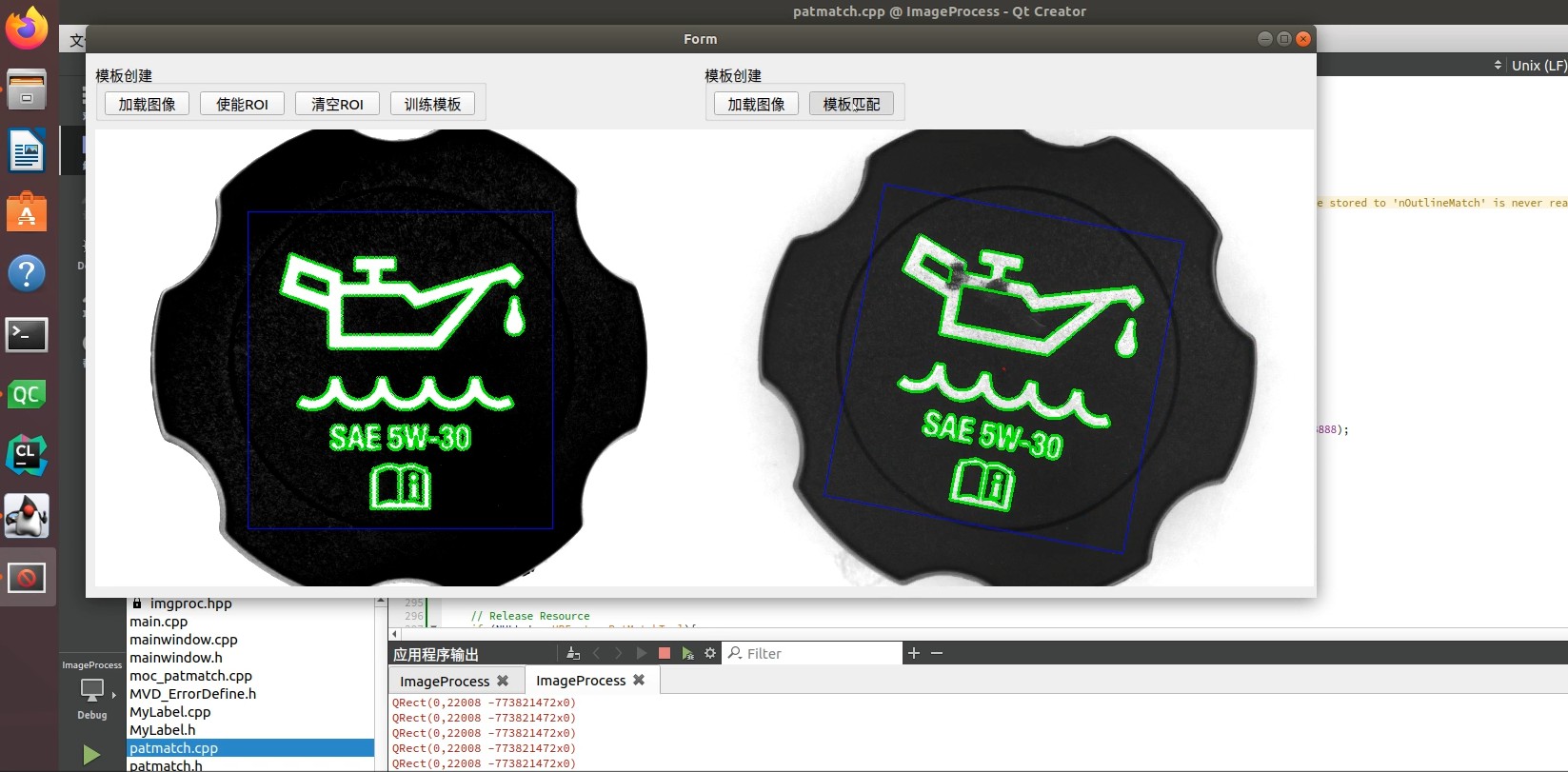
使用2D相机+VM实现复合机器人3D上下料的一指禅
使用2D相机+VM实现复合机器人3D上下料。
方案优势:
1.2D相机相比3D相机有经济成本优势,且对硬件资源的要求更低;
2.对于反光材质物体无法使用3D相机;
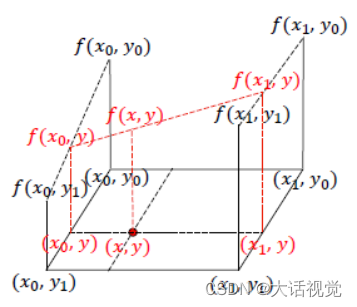
3.无需示教标识Mark点,仅通过自带单点抓取模块+自研2D-3D位姿估计模块,就能媲美3D手眼标定+PnP算法的效果;
4.操作简单,调试效率比3D更高;
5.结合海康2.5D定位引导算法,可尝试高度变化的复合机器人上下料场景;
6.精度比3D更高。

版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
评论请先登录 登录
全部评论 3

- 1

相关阅读
 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号