V版主_shadow Lv.1
9
文章
0
案例
回答
31
获赞
16
粉丝
软件开机自启动的四种方法
本文讲述软件开机自启动的四种方法,前三种只针对在计算机开机的时候,自动打开程序,如程序被人为关闭后,程序不会再自动运行。第四种方法可以在计算机开机的时候自动打开程序,且如果后续程序被人为关闭,也会在短时间内自动运行程序。
2695 3 1 2021-12-15 其它
ID6000通讯方式之FTP详细说明
在使用ID系列智能读码器时,经常会用到FTP这种通讯方式,那么该如何建立通讯并长期使用呢?本文将会讲解如何搭建和配置。
2995 0 2021-12-15 智能读码器
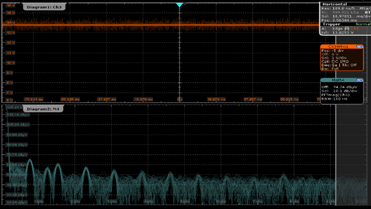
现场电磁干扰怎么排除
当我们在使用相机时可能会出现画面波动或者突然丢包的问题,可能是由于现场存在电磁干扰导致的,那么如何排查这一问题?这篇经验分享给
2508 8 2021-12-13 故障排查
网口相机丢包问题解决方法
本文主要讲解网口相机丢包时常见的问题解决方法,如果您的相机出现丢包问题,来和我一起排查是哪里的问题吧!
4744 7 2 2021-12-10 故障排查
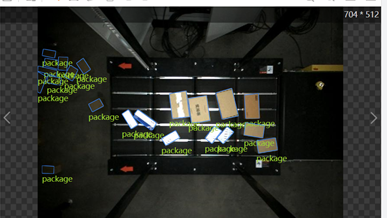
Vision Train 1.3.0本地云训练步骤
本文主要讲解如何使用Vision Train 1.3.0来进行本地云训练,并详细介绍了如何配置和使用Vision Train 1.3.0,仔细阅读本文将受益匪浅。
3128 3 2021-11-29 行业资讯
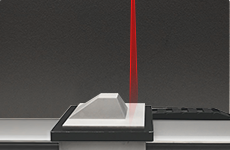
RGB-D 智能立体相机SDK
RGB-D智能立体相机采用主动双目立体成像技术,结合彩色摄像头输出高帧率 RGB-D 图像,并内置深度学习算法及 3D 图像处理算法,实时输出精准结果,可作为单件分离、机器人供包、拆码垛等应用的视觉系统核心,相机采用主动双目成像技术,搭配高效能激光模块与窄带滤光片,输出高质量深度图,同时搭载彩色摄像头输出RGB图像,支持RGB、深度图同步对齐输出,便于二次开发等。
3028 2 3 2021-11-29 二次开发
3D轮廓仪如何进行系统标定
安装设备时,难以确保安装后设备的X/Y方向所在平面与载物台平面平行,设备的Y方向也难以确保和运动扫描方向一致。设备的安装误差会影响测量的绝对精度,那么如何矫正这一误差并做出准确的数据呢?希望这篇3D轮廓仪系统标定文章可以帮到您。
3048 3 2021-11-26 方案选型
工业相机SDK错误码常见场景解析
在使用SDK二次开发过程中,接口的调用往往会遇到较多的错误,sdk错误码能够帮助我们快速分析错误原因,解决问题,针对常见的错误码,下面给出一下常见的问题原因,供大家分析
3944 1 2021-11-23 二次开发
底扫清洁设备操作方法经验分享
在使用ID7000时,是否会因为产品体积较大而导致的相机整体难以清理,底部积灰严重,甚至发热量增加的问题? 使用底扫清洁设备可以快速解决这一问题,那么如何使用呢?这篇文章帮你统统解决!
1868 4 5 2021-11-15 智能读码器
您正在使用的浏览器版本过低,请升级最新版本以获得更好的体验。
推荐使用以下浏览器






 浙公网安备 33010802013223号
浙公网安备 33010802013223号