RGB-D 智能立体相机SDK
- 3027
- 3
- 分享
- 2021-11-29 15:02
RGB-D智能立体相机采用主动双目立体成像技术,结合彩色摄像头输出高帧率 RGB-D 图像,并内置深度学习算法及 3D 图像处理算法,实时输出精准结果,可作为单件分离、机器人供包、拆码垛等应用的视觉系统核心,相机采用主动双目成像技术,搭配高效能激光模块与窄带滤光片,输出高质量深度图,同时搭载彩色摄像头输出RGB图像,支持RGB、深度图同步对齐输出,便于二次开发等。
一、SDK开发包获取
前往海康机器人官网|下载中心下载《机器视觉立体相机客户端3DMVS》进行安装;
开发包路径”../../Development/MvStereoAppSDK”
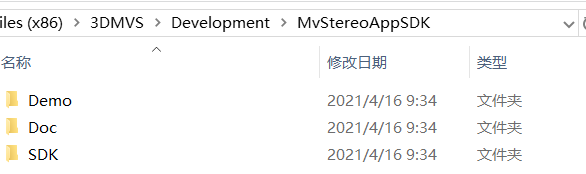
Demo:示例程序(VC/C/C#)文件夹
DOC:开发手册文件夹
SDK:动态库(C/C#语言)、lib、头文件
说明:
1、RGB-D相机二次开发SDK同轮廓仪等立体相机SDK。
2、调用流程一致、可参考Demo&开发手册。
3、通过SDK获取到的数据集合取决于相机设置的工作模式。
二、 SDK工作流程
用户通过MvStereoAppSDK可轻松获取RGB-D相机输出的丰富图像信息以及被测物体的三维信息、精准定位信息。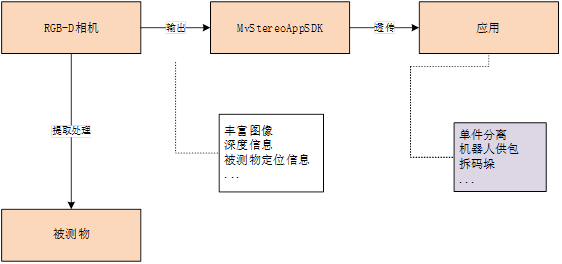
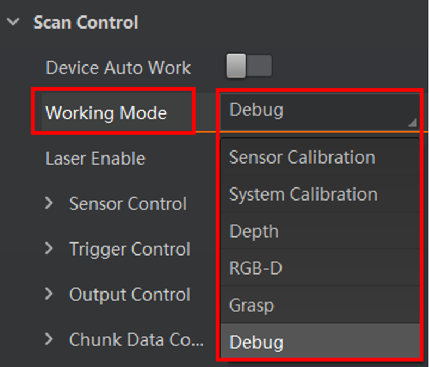
三、 相机工作模式
设备可输出多种类型的数据,例如原始图、深度图、彩色图和 RGB-D 图等。MvStereoAppSDK能够获取的数据取决于相机的输出,不同的工作模式可以输出数据不同。可通过Scan Control属性下的Sensor Control属性,找到Image Mode参数进行设置
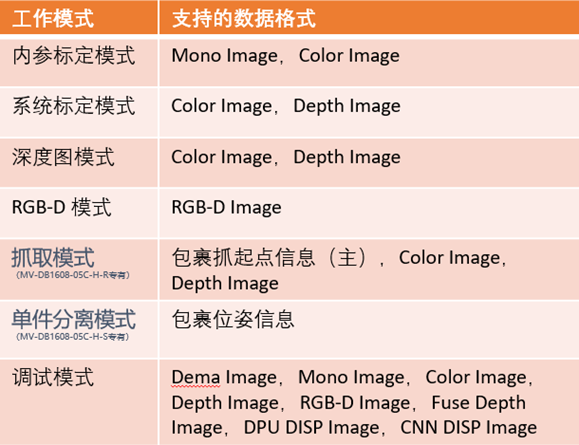
说明:
1、单件分离模式不输出图像,仅输出被测物的位姿信息。可以通过chunk功能选择输出图像信息。
2、融合深度图和视差图为技术人员在调试模式下定位问题时使用。
3、不同型号设备支持的图像模式有所差别,具体请以设备实际参数为准。
四、 像素格式
设备选择不同的图像模式,对应的像素格式以及所占的像素字节数有所差别。可通过Scan Control属性下的Sensor Control属性,查看Pixel Format参数确认对应的像素格式Pixel Size参数确认对应的像素格式
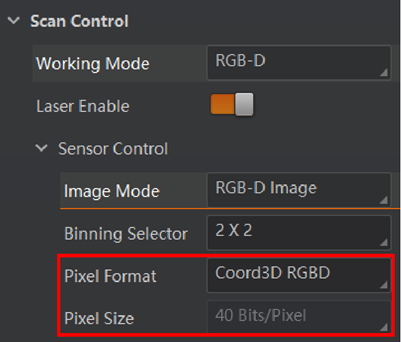

说明:
1、RGB-D图 指像素对齐后的彩色图+深度图。
2、Depth Image 深度图*:最终输出的深度图,用户使用深度图应选择此项。
五、 Chunk
设备支持将图像信息通过 Chunk 功能嵌入到图像数据中。图像嵌入信息会根据用户对每种信息的使能情况将图像信息嵌入到图像中。用户可以通过MvStereoAppSDK来获取它们。因为MV_STA_ReceiveDataTimeout/RegisterDataCallBack接口获取的是一个数据集合,你不需要其他的特定接口来获取它们。对于开发者而言,你不需要过多关注数据是否来源于Chunk。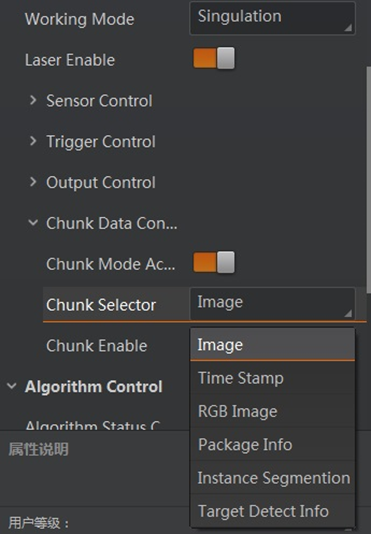
可嵌入的图像信息如下:
√ Image:图像数据信息
√ Time Stamp:时间戳
√ RGB Image:RGB 图像
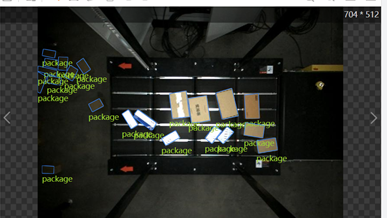
√ Package Info:包裹信息
√ Instance Segmention:实例分割结果
√ Target Detect Info:目标检测结果
√ Target Detect Info:目标检测结果
说明:
1、不同型号设备及不同工作模式下可设置的 Chunk 信息有所差别,具体请以实际功能为准。
2、输出包裹位姿信息需要进行相机标定。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 3


- 1


相关阅读
 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号