【3D系列】2D-2D对极几何估计相机运动3D位姿
- 999
- 0
- 分享
- 2024-10-14 09:03
当相机为单目时,我们只知道2D的像素坐标,能否根据两组2D点估计相机运动?本文将介绍利用对极几何实现2D-2D点估计相机运动3D位姿。
- 当相机为单目时,我们只知道2D的像素坐标,问题是根据两组2D点估计相机运动。该问题用对极几何来解决。
- 当相机为双目、RGB-D时,或者我们通过某种方法得到了距离信息,那问题就是根据两组3D点估计运动。该问题通常用ICP来解决。
- 如果我们有3D点和它们在相机的投影位置,也能估计相机的运动。该问题通过PnP求解。
本文将从最基本的2D-2D情形出发,根据两组2D点估计相机运行3D位姿。
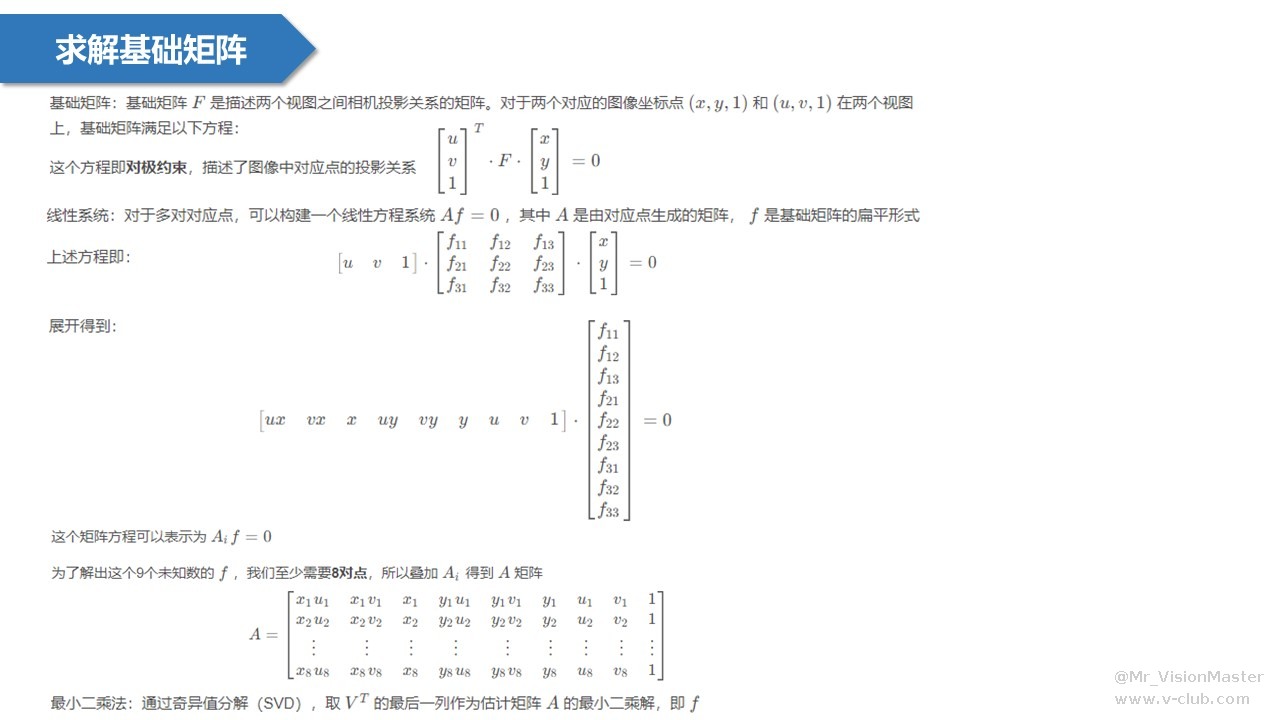
相机运行估计步骤:特征点提取->特征点匹配->求解基础矩阵->求解本质矩阵->分解恢复R和T->筛选正确的R和T->三角测量深度。







版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。


评论请先登录 登录
全部评论 0

相关阅读
 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号