潜伏机器人上读码头视野缩减经验分享
- 147
- 0
- 分享
- 2024-08-12 09:26
4.X主控潜伏机器人上读码头读码画面倍率调整
潜伏机器人上读码头视野缩减经验分享
1. 背景
(1) 某项目现场,二期增补的潜伏车与一期的潜伏车,在同一个货架底下上读码头读码画面不同,增补车读取的画面明显大于增补的车,如下图,经过排查后,确认是车辆属性文件中的上读码头倍率配置异常导致。


(2) 适用范围
仅适用于4.X版本主控的潜伏机器人
2. 验证操作
(1) 上读码头画面属性,均有属性文件控制,顾需确认设备所采用的属性文件,登录设备后,输入castor_get_sec_info,即可查看属性标识,或者在AGV日志中查看相应的软件标识

(2) 获取导软件标识名称后,进入/cset目录下,找到与软件标识名称一直的xml属性文件
(3) 打开下载的属性文件,找到<pod_yuv_enlarge>XXXX</pod_yuv_enlarge>配置项,将数值调小,默认数值是1500(可按照现场实际情况去调整大小),调整后保存文件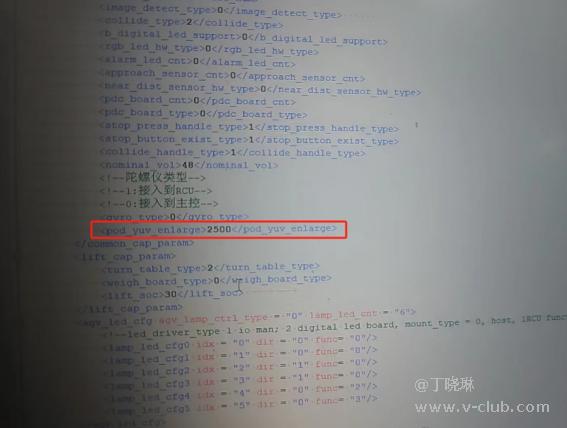
(4) 将保存的文件,通过rz指令上传到/home目录下
(5) 输入ps,找到carServer进程的pid号,然后用kill -9 pid号,杀掉进程
(6) 杀掉进程后,在/home目录下,执行 ./carServer & 重新拉起进程,等待小车上线后,重新在查看车辆上读码头的读码画面,可发现读码的画面变为正常的大小。
3. 问题解决
因涉及车辆属性文件,需提客诉单,单中需描述<pod_yuv_enlarge>配置项的具体值,转给到对应的研发,由研发重新出具一份属性文件升级包,通过mapstudiopro升级属性文件,即可修复该类问题。
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0


相关阅读
 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26- 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
 某项目呼叫器异常通讯拦截2024-08-20
某项目呼叫器异常通讯拦截2024-08-20- 某项目呼叫器异常通讯拦截2024-08-20
 【嵌入式开发】嵌入式算子开发2024-08-24
【嵌入式开发】嵌入式算子开发2024-08-24
 浙公网安备 33010802013223号
浙公网安备 33010802013223号