每日分享|3D视觉成像之双目立体视觉原理
- 1570
- 0
- 分享
- 2024-03-21 14:07
如何克服视差原理,在复杂的实际生活环境中获取物体的三维几何信息,进而完成三维测量与三维重建呢,本次让我们一起来了解双目立体视觉原理吧。
在了解双目立体视觉原理前,需要先明白“视差原理”
🎈视差原理:从有一定相对距离的两个位置点上,观察同一个目标所产生的视觉差异。
明白视差原理后,让我们走进双目立体视觉原理吧
💦它是什么:双目立体视觉系统使用两个或多个摄像头从不同角度拍摄同一物体。通过比较这些摄像头捕捉到的图像,系统可以计算出图像中对应点的视差,进而推算出物体的三维坐标。这种原理模仿了人眼的视觉系统,人眼通过左右眼的视差来感知物体的深度。
💥它的关键技术:◾相机标定-通过已知几何形状的标定板,对相机的镜头畸变进行校正,以确保图像的准确度。
◾图像匹配-通过算法比较两张或多张图像的相似性,确定视点间的对应关系。
◾深度计算-根据双目视觉的几何原理,通过比较图像的视差来计算物体距离。
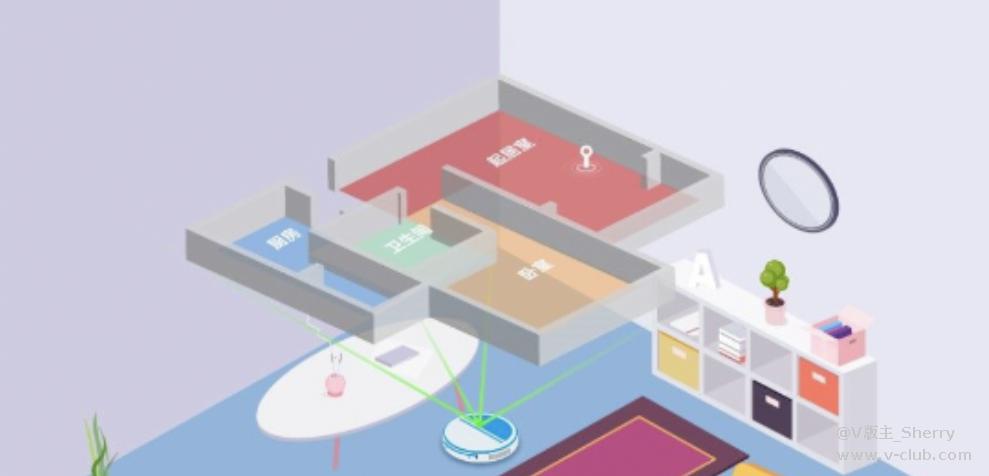
🚀它的应用:◾自动驾驶:通过双目视觉,车辆可以更准确地感知周围环境,提高安全性。
◾机器人导航:机器人可以通过双目视觉获取环境的深度信息,从而更好地适应环境。
◾三维重建:双目视觉可以用于构建大规模的三维地图,为虚拟现实和增强现实提供支持。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0


相关阅读
 【保姆级教程】算法模块封装详解2024-10-17
【保姆级教程】算法模块封装详解2024-10-17 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14 【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14
【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14 工程应用系列:CPK,GRR(一文讲清楚)2024-10-12
工程应用系列:CPK,GRR(一文讲清楚)2024-10-12 这里有份不用报名也能在启智杯获奖的秘籍!2024-10-24
这里有份不用报名也能在启智杯获奖的秘籍!2024-10-24
 浙公网安备 33010802013223号
浙公网安备 33010802013223号