


各类标定,都在这里
9篇
- 常见的标定方法简介
- VM应用之平移旋转标定使用
- 3D轮廓仪如何进行系统标定
- 双目相机标定原理
- 工程经验系列:视觉定位(标定设计,及应用)
- 浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
- 相机旋转,代替机械爪旋转,标定旋转中心。
- 【共享学习】单相机位与多相机定位分析
- 平移旋转标定模块与绝对坐标
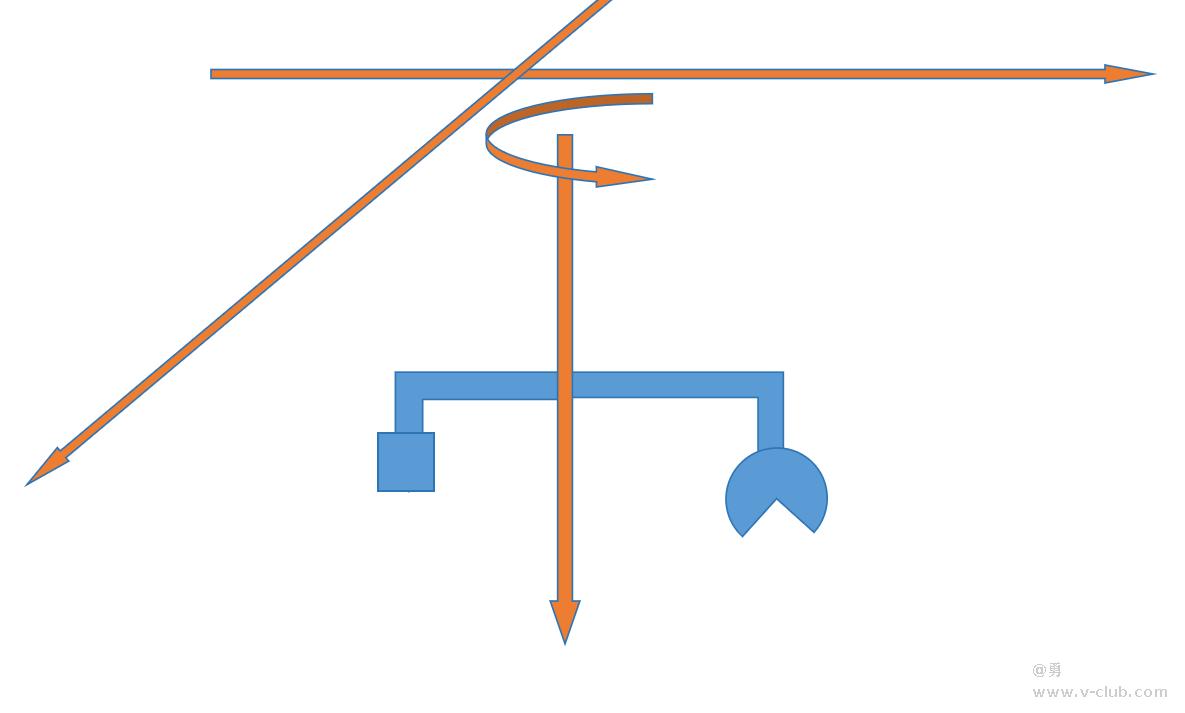
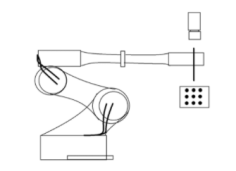
如上图所示。机器人有4个自由度:x,y,z,u(=zr)
机械夹爪,与相机,同时固定在Z轴上。
工作流程是:物料xyu 是随机的。 相机拍照 引导 机械爪,抓起物料。(属于一致性取料应用)
常规标定流程:
1,手动让机械夹爪,取一片料。然后,把料放到标准取料位置。并记录这个 标准取料位置(Qux,Quy,Qur)。
2,移动相机,让物料mark点 在相机中心位置附件。 设置该位置为 标定拍照位置,记录该位置(Bpaix,Bpaiy,Bpair)
3,相机按照 九宫格移动, 完成 9点标定。
4,机械爪,去(Qux,Quy,Qur) 位置, 取料,转动Qur。 然后放下物料。再移动相机(Bpaix,Bpaiy,Bpair) 来拍照。 重复这个过程,使用不同的Qur,在不同Qur的图片中,找到mark点。拟合圆心。该圆心就是旋转中心。(Pcenx,Pceny )
到这里,就标定完成了。
这种标定是最常规的标定方法。
优点:
1,坐标关系清晰,简单。便于理解。
缺点:
1,标定旋转中心的时候,需要反复取料,放料。这个过程,必定产生误差。导致标定精度下降。而且整个标定过程,看起来很笨拙,一点都不优雅。
本文提出一种新的标定方法。
前三部是一样的:
1,手动让机械夹爪,取一片料。然后,把料放到标准取料位置。并记录这个 标准取料位置(Qux,Quy,Qur)。
2,移动相机,让物料mark点 在相机中心位置附件。 设置该位置为 标定拍照位置,记录该位置(Bpaix,Bpaiy,Bpair)
3,相机按照 九宫格移动, 完成 9点标定。
4,相机回到(Bpaix,Bpaiy,Bpair),旋转Bpair,在不同的Bpair 拍照, 找到mark点。然后拟合圆心。标定完成。(Pcenx,Pceny)
5,通过转换 得到 Acenx, Aceny。
优点:
1,非接触标定,标定精度高。 标定过程很简洁,非常优雅。
缺点:
1,旋转中心是相对坐标,是间接标定。不能直接用,需要转个弯,初学者容易搞懵。
在常规的标定方法中 (cenx,ceny) 是 夹爪的旋转 像素坐标, 直接可以用。
在新的标定方法中(cenx,ceny) 是 相机的旋转 像素坐标。不能直接用。
但我们可以根据 这个结构的物理特性(相机的旋转轴,与 夹爪的旋转轴,是同一个轴)只是相机工作时候再拍照位, 夹爪工作的时候再取料位。
所以:夹爪的旋转中心坐标是:取料坐标(Qux,Quy)+ (取料坐标(Qux,Quy)- 拍照坐标(Bpaix,Bpaiy))+ (cenx,ceny)的机械坐标 - mark点 的机械坐标。
得到 夹爪的旋转中心坐标 Acenx, Aceny。
Acenx, Aceny。 怎么使用?
就是以Acenx, Aceny为寻找中心, (Qux,Quy)为旋转点, 以来料mark点的 相对角度 为夹角,计算 旋转前,与旋转后 的坐标差。
mark点,绝对坐标 - 坐标差 。 就是带旋转的取料坐标。
以上就是本贴的全部内容。利用相机旋转轴,与夹爪旋转轴共轴的特性。实现非接触标定。非常优雅。精准。




 浙公网安备 33010802013223号
浙公网安备 33010802013223号