- 1324
- 1
- 分享
- 2023-07-03 13:48
一、待机与休眠:
1.1、问题描述:小车背着货架,原地空闲一段时间后,小车下放货架,客户端上显示小车状态未知246
1.2、解析:246是V1协议下小车的待机状态值(V2协议为0x381),进入待机状态时,小车便会下放货架,这属于正常现象
1.3、解决措施:新版小车和平台对待机状态已进行优化,如想小车一直举升货架,可以关闭待机和休眠模式,使用新版robox工具,在能源配置中可以直接关闭。

二、小车任务空闲
2.1、小车任务空闲可以分成两种大类讨论:
①、小车举着货架执行任务过程中,子任务还在执行中,小车报任务空闲
②、网页显示有任务在执行中,但是没有小车执行任务
2.2、排查流程如下图
 三、激光遇障问题
三、激光遇障问题
3.1、AGV遇障问题按情况分类可分为:
①固定地方所有车遇障
②固定地方特定小车遇障
③特定小车随机地方遇障
④小车背起货架移动就遇障

3.2、针对遇障问题,出现遇障时,可以使用robox工具查看小车激光当前检测到什么,激光检测范围内/保护空间内是否检测到障碍物,查看障碍物距离车的距离,当前小车举升的货架大小、激光方案等

3.3、4.0版本及以后的车,也可以通过下载RCD、lidar、sens日志,使用IAS工具进行回放
导入相应日志后,选择具体地图和时间段,点击定位分析,待软件加载完成后,就可以直观的看到小车当时的运动状态
3.4、进入回放,可以选择上方的

感知回放功能,查看小车遇障时检测到的数据

四、平台指令出错问题
4.1、平台指令出错,是小车判断当前状态下小车无法执行平台任务,告警1/13
 此问题的排查也相对简单,流程如下图
此问题的排查也相对简单,流程如下图
4.2、具体排查方式:
4.2.1、搜索AGV日志告警ALARM_PROC,找到1/13告警,如下图

4.2.2、定位到告警处,有告警码复制告警码至告警表进行搜索
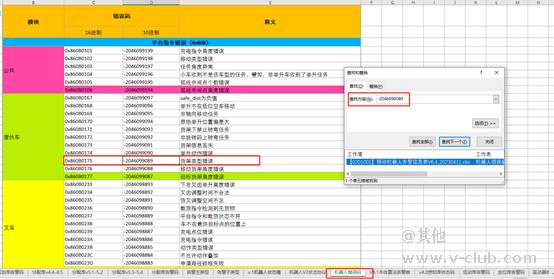
4.2.3、可以看到,这个告警码显示是货架类型错误,那么回到日志中,查看平台下发的任务中,货架类型是什么
plat_move_req_v2 received是平台写入的任务,Pod cmd received是任务对应的货架信息

4.2.4、从图片中可以看到,平台发的货架类型是pod_type = 101,对应小车pod_conf_xml中的编号1,这时我们就可以去查看一下小车的pod文件中,是否有编号1的参数,对应尺寸是否匹配
4.2.5、正常3.0以后的平台和小车,平台修改货架参数后,远程配置RCS后,小车即会重新下载新的pod文件,如果pod文件在远程配置RCS后不会自动更新新的,需要确认下pod文件中参数个数是否已经超过32个,未超过32个不自动更新需要进行对应排查
五、AGV任务执行完不去暂住点
5.1、问题描述:AGV在工位执行完任务后,原地任务空闲,有暂住点不去


5.2、分析:遇到这种情况,可以先检查地图上的暂住点是否充足,有空闲的暂住点可以使用监控客户端的路径连通性检测,排查路径点位是否合理,如路径连通,那么需要提供对应时间段的日志录像进行排查
六、路径规划告警
6.1、问题描述:小车举升货架后,原地报错路径规划告警(x,y)
6.2、解析:路径规划告警是指任务执行路径上,货架或小车无有效路径通行,其中包括货架方向、货架类型、AGV类型和点位角度。触发告警时,可以使用路径连通性查询进行检测(见5.2);根据告警内容信息,检查对应路径上的货架方向、点位方向和旋转类型
6.3、准入车型错误
如下图,报错的点位是207909,154930;意思就是该点位不允许当前小车这种车型进入,报错的是点位,检查报错点位配置的车型要求。

6.4、车体角度错误
如下图,小车举起货架后报错目标点错误(车体角度错误),并附有对应坐标,角度错误多数是目标点有角度要求,但是规划路径时发现,路径上没有点位可以让小车把角度调整到任务需要的目标角度,此时需要检查任务路径上是否限制了旋转车型

七、小车不在拓扑元素中
7.1、问题解析:小车报错不在拓扑元素中,是指小车停止位置不正确、小车类型与点准入车型不符、货架方向与点位配置不符。

7.2、货架方向配置问题
问题描述:小车在举升货架后,监控客户端上显示任务空闲,小车屏幕显示小车不在拓扑元素中
解析:举升货架后,规划库会校验货架方向与点位属性的配置是否一致,不一致不会便会输出告警-1020
临时恢复措施是将货架方向旋转90度或将车急停推出到通道上(没有货架方向限制的点位),即可恢复
永久方案:点位货架角度及货架目标方向配置固定值,小车自动化运行区域,不要进行人为搬货架或者其他会影响货架位置的操作

八、取消充电后小车有路径不离开充电桩
8.1、问题现象:小车取消充电任务后,客户端上有路径,但是小车一直不离开充电桩,货架任务给到小车,小车也不执行,一直充到99电才离开充电桩
8.2、排查方法:查看AGV日志,小车是否有收到充电取消任务,排查流程如下图
 8.3、日志排查:AGV日志搜索plat_move_req_v2 received,查看平台下发的任务,找到对应时间段,查找是否有下发action_type = 6(取消任务),有下发则代表平台已经发送了取消任务指令,小车应该结束充电移动到平台下发的新目标点。
8.3、日志排查:AGV日志搜索plat_move_req_v2 received,查看平台下发的任务,找到对应时间段,查找是否有下发action_type = 6(取消任务),有下发则代表平台已经发送了取消任务指令,小车应该结束充电移动到平台下发的新目标点。
九、A任务优先级比B任务优先级高,但是小车先执行B任务
9.1、任务优先级priority,在cms网页中优先级从1到127,值越大优先级越高,在分配库中则相反,值越小优先级越大。正常的分配情况是,优先级越高便优先执行,但是其中也有特例,便是未锁定的空车移动任务move_robot(分配库中为tsk_type -1),空车移动任务未锁定时,无论优先级多高,只要有其他类型的搬运任务适配小车,就会优先执行搬运任务,即使空车移动任务已经分配车执行。
9.2、常见问题任务模板,如下图

此任务模板第一个子任务为空车移动任务,第一步移动没有完成时为影子任务,影子任务是可以切车或切任务的,只有在影子任务转为真实任务时,模板里的锁定标识才起作用
9.3、如果想要空车移动任务也能按照普通搬运任务模板的优先级进行分配或和其他模板可以进行优先级区分,那么可以将其他模板的第一步子任务也更改为空车移动任务

- 1

 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26- 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
 某项目呼叫器异常通讯拦截2024-08-20
某项目呼叫器异常通讯拦截2024-08-20- 某项目呼叫器异常通讯拦截2024-08-20
 【嵌入式开发】嵌入式算子开发2024-08-24
【嵌入式开发】嵌入式算子开发2024-08-24
 浙公网安备 33010802013223号
浙公网安备 33010802013223号