总装完成线效率优化
- 368
- 0
- 分享
- 2023-06-30 11:03
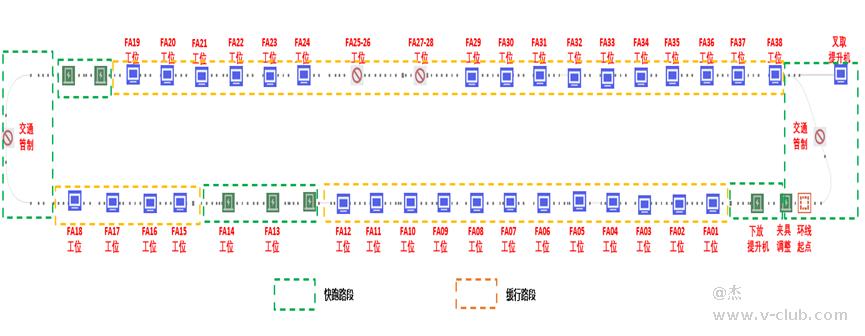
车行业第一个总装线体项目,环线流水线,节拍要求高,AGV稳定性高。
项目需求概述
总装线体完成线H9需要满足35JP
解决方案
1、 优化底涂轮胎工位举升逻辑。
2、 轮胎工位边走边降业务逻辑。
3、 边退边降业务逻辑。

业务配置
1. 举升点位配置
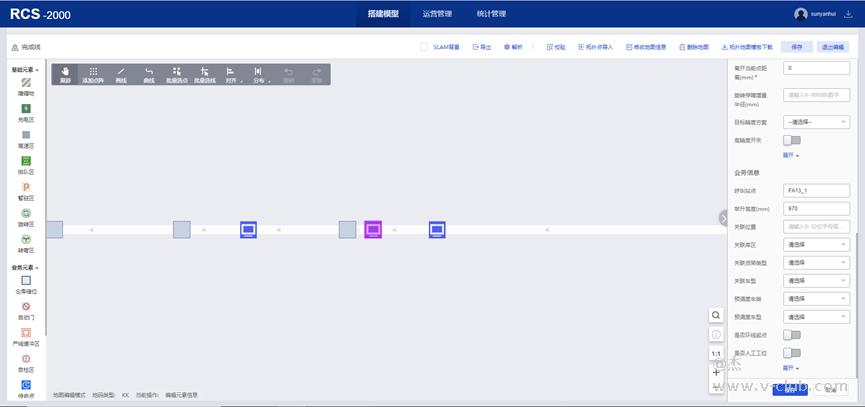
如图FA13_1工位需举升970mm,点位可配置970mm(高度可根据现场工艺不同在决定举升高度)
2. 边走边举升点位配置

如上图所示,例点位A需举升高度为650mm,但因现场需求,需要边走边举升来节约时间,在点位配置中在举升点位置填入点位B的点位位置信息如(300000KK200000),H9在行走到此坐标后开始进行边走边举升

3. 边后退边下降点位配置

如现场有后退路段,例点位B到点位A需边后退边下降,即可在点位B配置举升点为点位A的坐标
项目亮点
Ø 满足项目所需节拍要求
节拍要求已满足25JPH,30JPH,35JPH
Ø 节约充电时长
AGV动作合并及分解,延长小车充电时间,保证电量。
Ø 节约举升作业时常
原从AGV到位到举升或者下降结束需10s,现运行过程中完成,节约时间5S.
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
评论请先登录 登录
全部评论 0


相关阅读
 【技术分享】通过脚本来重置变量计算模块中变量的值2024-05-22
【技术分享】通过脚本来重置变量计算模块中变量的值2024-05-22 【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30
【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30 海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13
海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13 【光电传感器基础】—3、光电传感器的基本操作和效果演示2024-05-15
【光电传感器基础】—3、光电传感器的基本操作和效果演示2024-05-15 纸杯机缺陷检测视觉解决方案2024-05-31
纸杯机缺陷检测视觉解决方案2024-05-31
 浙公网安备 33010802013223号
浙公网安备 33010802013223号