


- 线阵相机及镜头选型方法简介
- 线阵工业相机的曝光、行频与帧率的关系
- 线阵相机触发成像起始波动问题的定位方法
- 线阵产品成像局部拉伸压缩解决方法
- 线阵工业相机的分倍频操作
- 线阵产品不定行高使用方式介绍
- 线阵工业相机平场(PRNUC)矫正步骤说明
线阵相机触发成像起始波动问题的定位方法
- 2850
- 3
- 分享
- 2022-12-14 09:55
在使用线阵产品的过程中,帧+行触发,成像起始的位置会出现波动的情况这个问题,协同定位了很多种情况,现在根据实际遇到的问题和现象,给大家分享一下经验
本文适用的场景:线阵使用帧+行触发,但是触发起始位置是波动
一、 信号问题
1、信号有杂波或接线有错误
1.1、原因分析:相机响应的“帧信号”,不是客户实际的信号,而是信号杂波
1.2、排查思路:
i. 将帧信号源(如line0),设置为编码器源(相机端设置为分频器源)
给一个帧触发信号,若计数为2,则说明相机IO只收到了一个信号
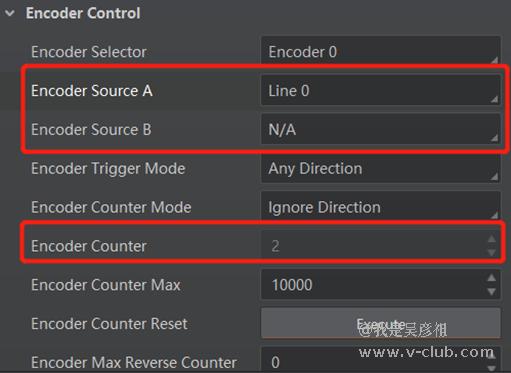
ii. 若计数不是2,则说明有杂波存在
1.3、解决方案
i. 检查接线,确认相机信号地和客户触发源信号地是接在一起的
ii. 增大滤波时间,直到信号个数稳定
iii. 客户处改善信号质量
2、 帧信号不稳定
2.1、 原因分析:客户的帧信号给出的时机是波动的
2.2、 排查思路:
i. 让客户按照固定的时间间隔发信号,查看波形是否均匀
ii. 交叉测试,换一个稳定的触发源测试,如信号发生器
2.3、 解决方案:客户处优化信号源
3、 帧触发源有问题
3.1、原因分析:触发源异常
3.2、排查思路:交叉测试,用信号发生器或其他信号源测试
3.3、解决方案:换一个出图正常的触发源
4、行触发信号起始位置不对
4.1、原因分析:客户处行信号不是编码器,而是在特定的时间,给出一定个数的脉冲串,相机收到帧信号后,等待行信号,当第一个行信号的时机不稳定时,会导致起始位置波动
4.2、排查思路:
i. 确认行信号方案,若是上述原因分析的方案,则可能是该原因
ii. 关闭行信号,行信号走内触发,查看起始位置是否波动
iii. 示波器两通道测行信号和帧信号,观察时序
4.3、解决思路:
i. 若有更优的方案,更改方案,换成已知的成熟方案,如编码器触发,行触发内触发等
ii. 客户处优化行信号给出的逻辑
二、 环境问题
1、运动机构不稳
1.1、 原因分析:运动机构存在抖动的现象,导致起始位置有波动
1.2、 排查思路:
i. 调整运动速度,一般运动速度低,平稳度更高,观察是否有改善
ii. 调整加速度,加速度低,不容易发生相对摩擦,观察是否有改善
iii. 观察机构运行路径,是否有不平或者遮挡的地方
1.3、解决方案:需要客户处优化运动机构
三、 相机问题
1、cameralink相机残留帧
1.1、原因分析:
i. 错误重现:已给一次帧信号(连续多个),当前帧未出完,然后关闭采集,再开始采集重新给第二次帧信号(连续多个)
ii. 理论分析:对相机,第二个帧信号忽略,后续的行信号补给第一帧,对采集卡,开始采集清除缓存,重新等待下一帧的帧头,刚好响应第二次的靠后的帧信号
1.2、排查思路:
i. 将帧信号源设置为编码器源或分频器源,查看客户给帧信号时,统计的是否是多个帧信号,若是多个,则可能是该原因
ii. 采集卡使用LineScan模式,若不在波动,则可能是这个原因

iii. 打开帧超时,当相机补黑输出后,再继续操作,若能解决,可能是这个原因

1.3、解决方案:
i. 更改给信号的逻辑,避免相机出图未完成时操作相机
ii. 采集卡采用LineScan模式
iii. 使用帧超时功能
iv. 帧触发走采集卡触发,采集卡触发相机
2、相机IO有问题
2.1、原因分析:IO烧坏或本身就有问题
2.2、排查思路:交叉测试,换IO测试
2.3、解决思路:换其他IO进行触发测试
以上就是总结的定位线阵相机帧+行触发,成像起始位置有波动的问题,定位排查的思路方法
希望能够帮助到使用海康机器人线阵相机的各位
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
评论请先登录 登录
全部评论 3

- 1

所属专题
相关阅读
 【保姆级教程】算法模块封装详解2024-10-17
【保姆级教程】算法模块封装详解2024-10-17 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14 【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14
【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14 工程应用系列:CPK,GRR(一文讲清楚)2024-10-12
工程应用系列:CPK,GRR(一文讲清楚)2024-10-12 这里有份不用报名也能在启智杯获奖的秘籍!2024-10-24
这里有份不用报名也能在启智杯获奖的秘籍!2024-10-24
 浙公网安备 33010802013223号
浙公网安备 33010802013223号