


各类标定,都在这里
9篇
- 常见的标定方法简介
- VM应用之平移旋转标定使用
- 3D轮廓仪如何进行系统标定
- 双目相机标定原理
- 工程经验系列:视觉定位(标定设计,及应用)
- 浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
- 相机旋转,代替机械爪旋转,标定旋转中心。
- 【共享学习】单相机位与多相机定位分析
- 平移旋转标定模块与绝对坐标
畸变,分 透视畸变, 径向畸变。

透视畸变,是因为被拍摄的物体,与 相机的焦平面 不平行。(也称为 切向畸变)
遵循,近大,远小的原则。越靠近相机部分越大,越远离相机部分越小。 就是 正方形,变成了梯形。
径向畸变,是镜头缺陷产生的,一般焦距越小,畸变越严重。比如鱼眼镜头。 就是把 正方形,变成水桶型,或枕头型。中间凸起,或凹陷。

上图所示,就是 既有 透视畸变,又有径向畸变。
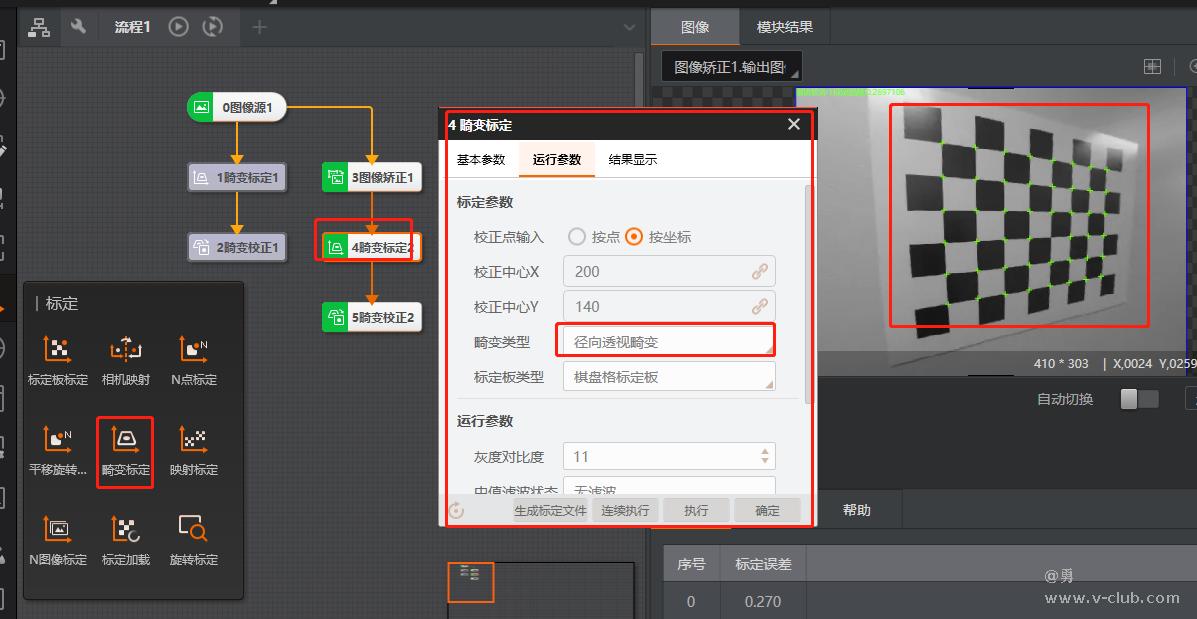
可以用 VM畸变标定工具,来得到畸变矫正的 mat文件。
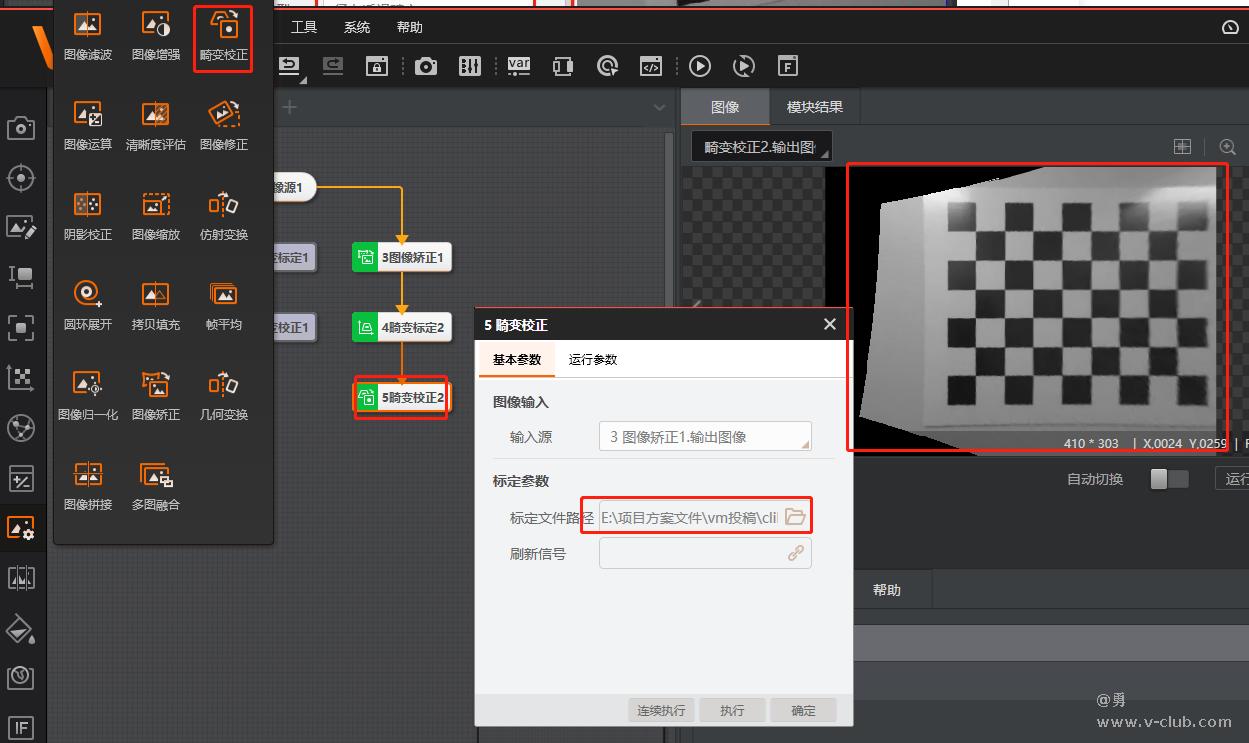

矫正后,就得到这个,比较正的图片。
这个矫正过程,有个关键点,要注意:
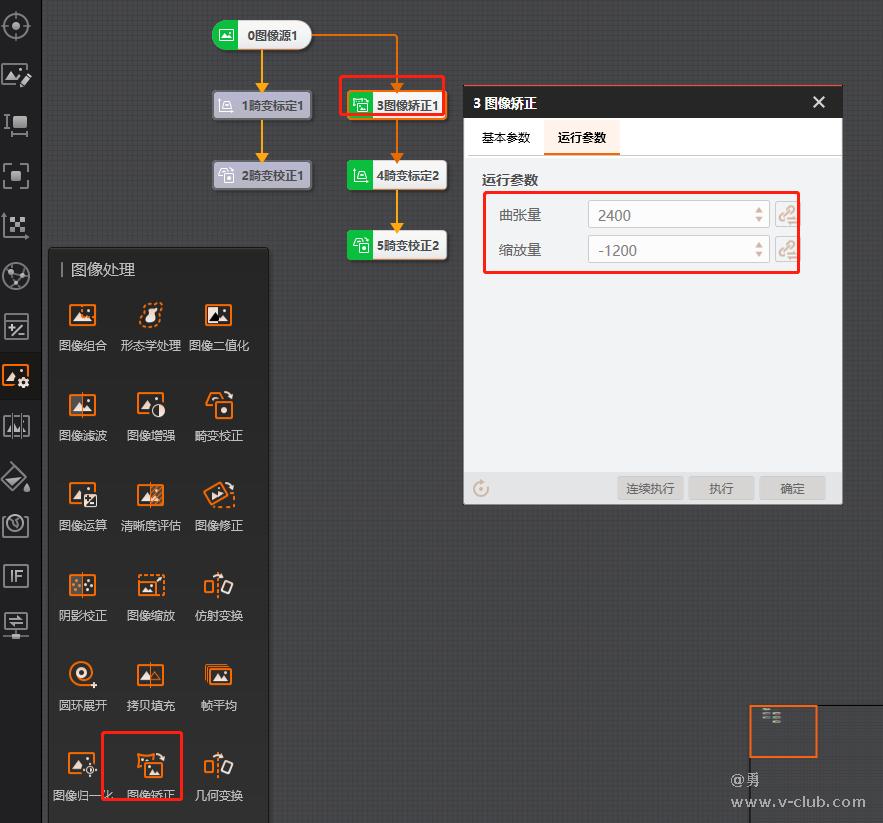
1,畸变标定的时候,尽量找到全部点。
2,当原图畸变比较严重(一般是径向畸变很严重的时候,就是比较凸,或比较凹的时候),畸变标定工具,找到的点比较少,而且怎么调参数都不好使的时候,可以先手动调整图像的曲张量。如下图所示,先手动把图片拉直。然后再做畸变标定。就能找到比较多的标定点。
以上就是VM 畸变标定和畸变校正工具的使用。
非常简单易用。而且应用很广。
比如:高精度定位,测量的时候。一般都会做一下畸变校正。(用精度很高的标定板,来矫正镜头畸变,相机安装不垂直误差)
比如:相机不能垂直物体拍摄的时候,一定是用畸变校正,调整过来。
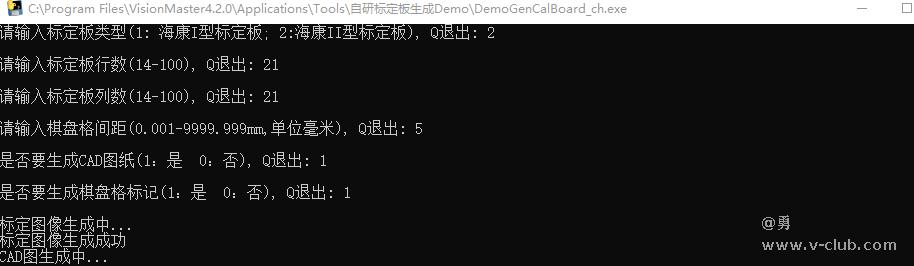
VM还提供了,带二维码信息的标定板。可以如下图所示,生成后,找光学玻璃厂商定制。玻璃的精度能达到2-5μ。 菲林的精度可以达到10μ
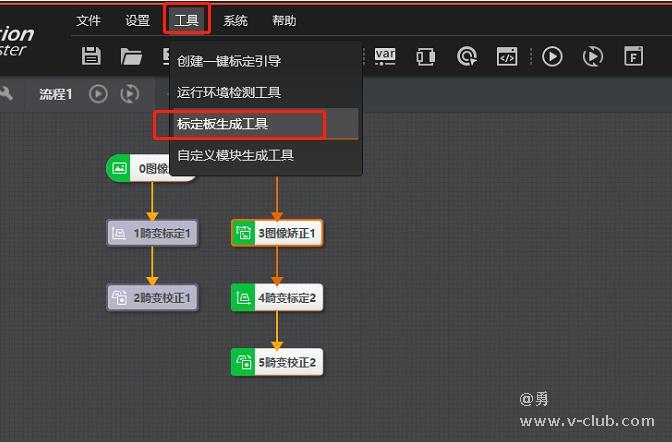
这个应该是借鉴visionpro的标定板。非常好用。
主要是在2个方面。
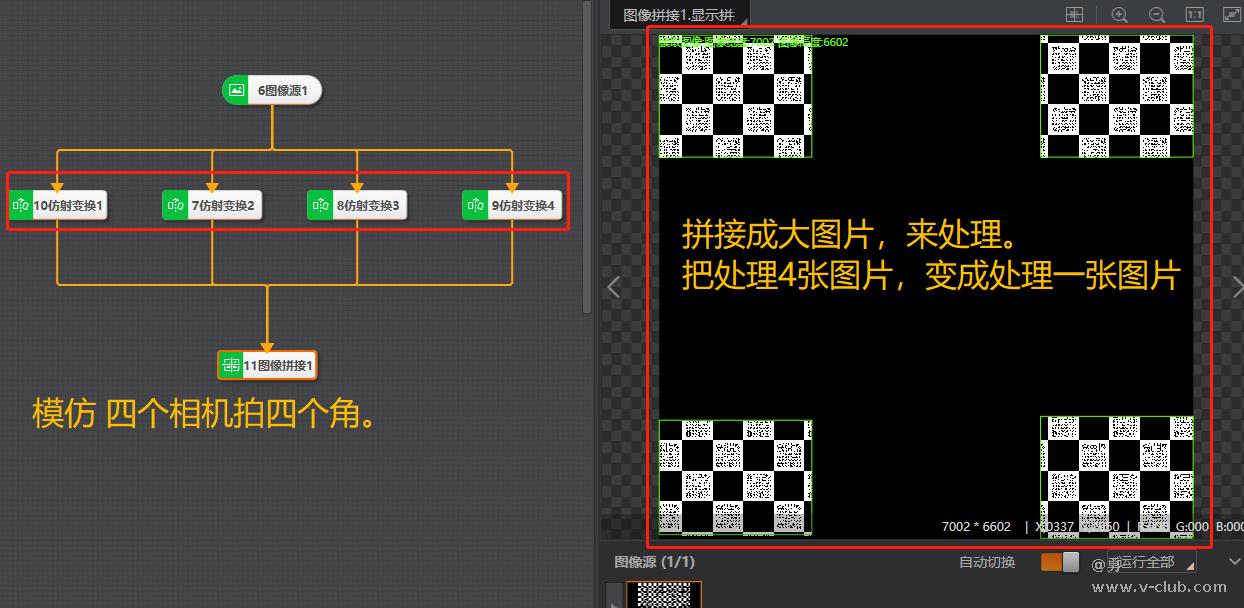
1,直接拼图
应用:大尺寸屏幕贴合定位。多相机,拍局部。然后计算出大尺寸贴合位置,角度。
优点:直观,把处理多图问题,直观变成处理单图问题。
缺点:拼图费时。
如下图所示
2,直接把图像坐标,变换到标定板坐标。
图像处理后,得到的坐标转到大标定板坐标,然后后面所有的计算,都用定板坐标来计算。
如果有与机械轴做N点标定,标定时,代入的坐标也是 标定板坐标 和 机械轴坐标。
应用:
1,多相机测量大尺度的时候,非常方便。不需要拼图,节约时间。
2,单相机,移动轴,测量大尺度的时候。
3,异轴移动相机定位的时候。
优点:不用拼图,节约时间。
缺点:不够直观,需要理解后才能灵活应用。
单相机+移动轴 转到大标定板。
其原理就是,
让移动轴,与大标定板,建立变化关系(用N点标定)。然后让 把小视野图片+轴坐标 变换到大标定板坐标。
如果轴移动点位少,可以直接提前在所有点位下拍大标定板,并生成的标定转换关系,然后保存下来。
工作的时候,用查表的方式,用不同的轴位置下的标定转换关系,把小视野转到大标定板。
通常标定板的精度要优于轴精度。轴的重复性精度要优于轴绝对精度。
利用这两个特性。可以解决大尺寸测量定位对轴精度的依赖。且不引入轴直线度误差。
(对于大尺寸测量,这个细节很重要,轴行程越长,直线度的影响也大)
移动轴变换到大标定板的应用非常灵活。但不适合新手。新手主要掌握第一种用途。

你好,我相机安装后画面X轴Y轴跟机械的有点偏差,也就是相机安装的平面角度有偏差,用畸变校正可以吗?还是需要怎样设置?



 浙公网安备 33010802013223号
浙公网安备 33010802013223号