- 3385
- 0
- 分享
- 2022-10-17 19:47
随着Visionmaster算法平台3D版本的发布,本类文章主要介绍VM3D版本在实际案例中如何搭载方案实例。本文介绍3D激光轮廓传感器使用VM3D在PCB插针行业的应用,例如:检测插针高度,插针歪斜、漏插等情况。
一、整体思路
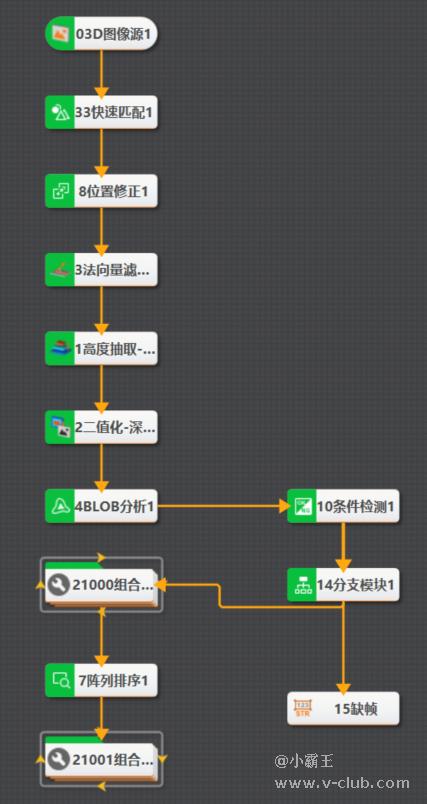
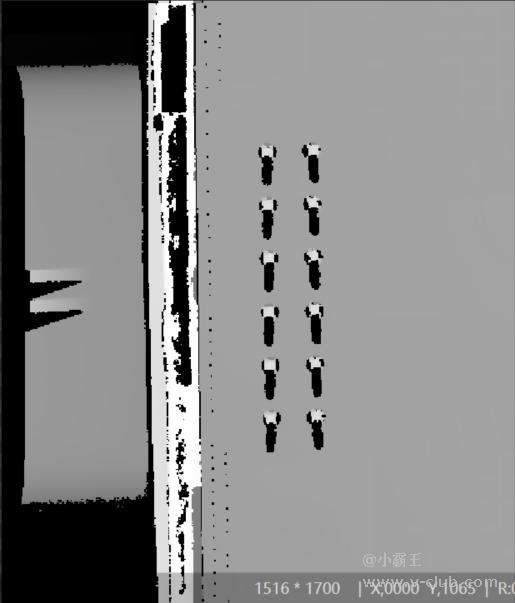
首先输入3D激光轮廓传感器采集得到的深度图,然后进行一些图像处理:滤除噪点,得到我们所需高度的深度数据,处理得到二值图这种非黑即白的图像,经过BLOB模块处理,然后通过阵列排序模块进行建模即可。深度图样品如图:
二、图像源输入

在3D模块集中,选取3D图像源模块,选取采集得到的图像。一般我们在流水线上可能实物出现缺料等情况,因此我们加入一个快速匹配模块,简单判断该图像是否是我们所需的图像源——即简单判断有无。再者采集得到的图像可能实物一致但是位置发生了偏移,因此我们还需要一个模块来修正图像位置——位置修正模块。
三、图像处理

因为3D轮廓仪对针脚扫描的过程中,会在针脚附近产生很多噪点,我们通过法向量滤波过滤掉一些噪点,避免其成为针脚有效点。我们通过高度抽取模块来提取出指定高度(正常针脚的高度范围)的针脚深度信息,输出一张深度图。
四、找到各个针脚位置
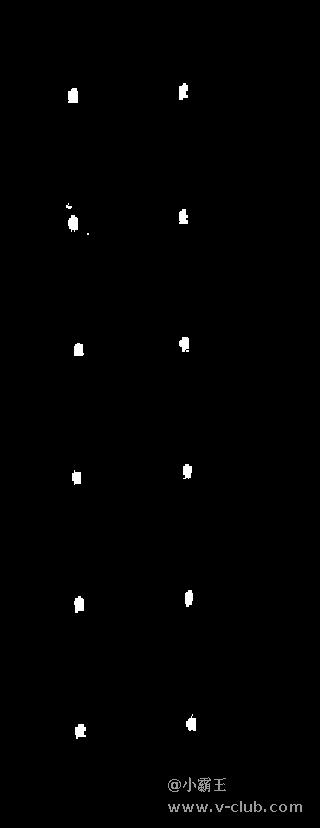
得到只含针脚信息的深度图后,我们可以通过blob模块来提取出各个针脚外接矩形,但是有些样品通过高度抽取后,可能还是存在过多噪点,我们通过二值化模块将大于某深度值的点全为1,小于全为0即可。最后输出blob图像。如图

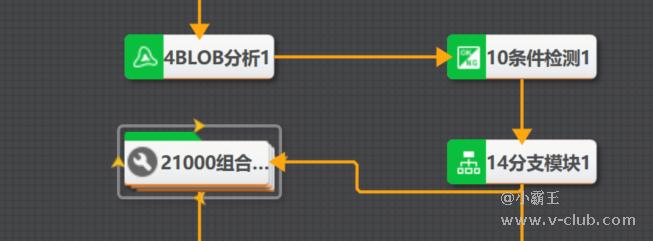
这种图像处理起来就尤为方便。我们通过条件检测,判断blob的数量,即可判断针脚有无,如果为OK即继续判断插针歪斜等情况;如果为NG,即接一个格式化输出NG残次品即可。将得到的图像输入到group中。通过统计测量模块获取我们所需blob中心点的位置坐标,即针脚的3D位置坐标,输入点集中即可。

五、构建插针模板

VM3D中,阵列排序模块可以建立一个点集坐标模板,后面输入的图像源,通过前面的步骤,得到每个针脚的3D坐标,与该模板对比,就是该模块的功能。
六、输出偏差位置文本

通过阵列排序得到坐标偏差值,我们拉取一个group模块,在其中通过条件检测模块判断每个坐标值与模板的偏差值,用来判断该针脚是OK还是NG,并且通过文本保存模块输出每个针脚坐标的偏差值,进行统计。最后显示结果如图



 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号