


- 线阵相机及镜头选型方法简介
- 线阵工业相机的曝光、行频与帧率的关系
- 线阵相机触发成像起始波动问题的定位方法
- 线阵产品成像局部拉伸压缩解决方法
- 线阵工业相机的分倍频操作
- 线阵产品不定行高使用方式介绍
- 线阵工业相机平场(PRNUC)矫正步骤说明
线阵相机及镜头选型方法简介
- 3217
- 0
- 分享
- 2022-10-10 10:03
根据几个简单的例子,介绍实际应用中的线阵相机以及配套镜头选型方案。
线阵相机和镜头选型案例介绍
此处采用几个例子,更加生动地为大家介绍一下线阵相机及镜头的选型方法。
1.线阵相机选型案例
1.1客户检测需求如下:
Ø匀速流水线彩色布匹缺陷检测需求;
Ø检测幅宽为400mm;
Ø要求精度为0.2mm;
Ø流水线速度为恒定1.5m/s 。
1.2线阵相机选型计算过程:
Ø彩色布匹缺陷检测,选用彩色相机
Ø实际使用中一般用2~3个像素对应一个最小的缺陷或特征,例如用3个像素,则实际所需单像素精度约为0.067mm
Ø所需分辨率计算=检测幅宽/单像素精度≈5970,锁定8k及以上分辨率相机
Ø为保证图像不拉伸压缩,则横纵向单像素精度需保持一致,可计算大致所需行频=移动速度/单像素精度≈17.9kHz
Ø最终可选择的相机有MV-CL086-90CC、MV-CL086-91CC-PRO、MV-CL086-91GC(其中网口相机需要开启无损压缩才能达到)
2.线阵镜头选型案例
2.1案例一
2.1.1选型需求:
Ø相机:MV-CL086-90CC
Ø检测幅宽为400mm
Ø工作距离500mm
2.1.2选型计算过程:
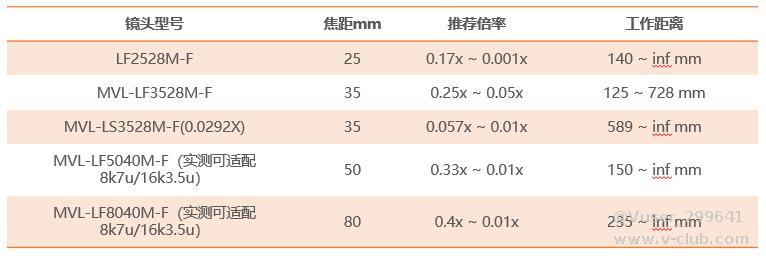
Ø根据相机型号,锁定可选镜头列表,如右上图
Ø相机靶面= 8192 × 5 μm = 40.96 mm
Ø放大倍率β = 相机靶面/检测视野 = 40.96/400 = 0.1024
Ø使用估算公式: β=f/WD,进行近似计算得,焦距f=51.2mm
Ø可选择镜头MVL-LF5040M-F
Ø由于相机光学接口和镜头接口不匹配,还需选配M72-F转接环(注意后焦匹配)
2.2案例二
2.2.1选型需求:
Ø相机:MV-CL161-41CM
Ø检测幅宽为600mm
Ø工作距离不定
2.2.2选型计算过程:
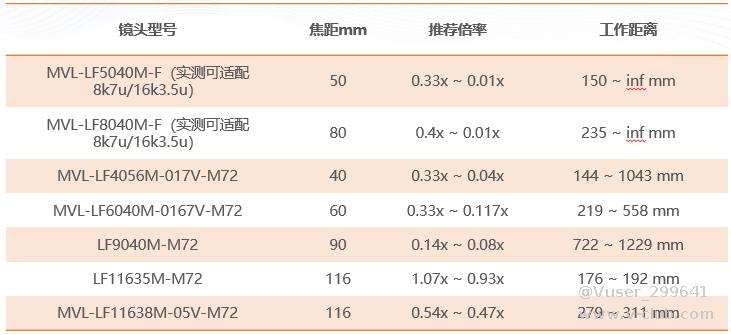
Ø根据相机型号,锁定可选镜头列表,如右上图
Ø相机靶面= 16384 × 3.5 μm = 57.344 mm
Ø放大倍率β = 相机靶面/检测视野 = 57.355/600 = 0.096
Ø在表格中“推荐倍率”列匹配放大倍率合适的镜头,锁定MVL-LF5040M-F、MVL-LF8040M-F、MVL-LF4056M-017V-M72、LF9040M-M72
Ø使用估算公式: WD=f/β,进行近似计算得出各个镜头匹配的工作距离,供客户选择
ØF口镜头还需选配M72-F转接环
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0

所属专题
相关阅读
 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号