

- 线阵相机及镜头选型方法简介
- 线阵工业相机的曝光、行频与帧率的关系
- 线阵相机触发成像起始波动问题的定位方法
- 线阵产品成像局部拉伸压缩解决方法
- 线阵工业相机的分倍频操作
- 线阵产品不定行高使用方式介绍
- 线阵工业相机平场(PRNUC)矫正步骤说明
线阵产品不定行高使用方式介绍
- 3297
- 4
- 分享
- 2022-07-13 09:57
很多朋友,在使用海康机器人的线阵产品时,都希望线阵相机能够根据目标物的长度来调整出图高度。
我在使用中,也非常希望有这样的功能。
值得高兴的是,目前海康机器人的部分线阵相机已经具备了该功能。接下来,我会把我使用该功能的步骤,记录下来,提供给朋友们参考
为了方便大家理解,我自己搭建了一个线阵产品的使用环境:
1. 以光电开关做帧触发信号,编码器做行触发信号为例,如下图所示架设设备
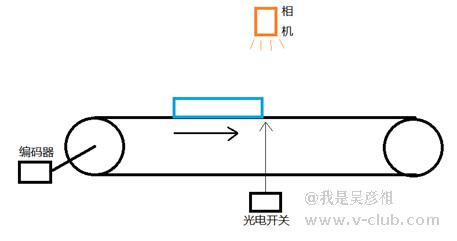

2. 触发接线参考常规相机帧+行触发接线方式即可,本文以Line0、Line3接编码器A、B相信号,Line1接帧触发信号为例
接下来是海康机器人的MVS客户端的设置介绍
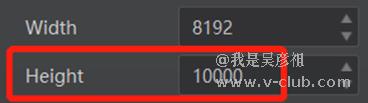
1. 设置图像高度,这个值应大于最长物料所需行高
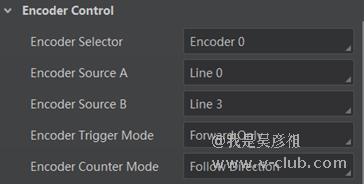
2. 设置编码器行触发

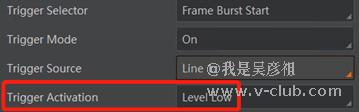
3. 设置帧触发,注意:触发极性选择低电平

4. 设置不定行高出图功能
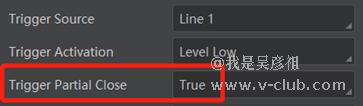
4.1第一种参数类型(有Trigger Partial Close参数)
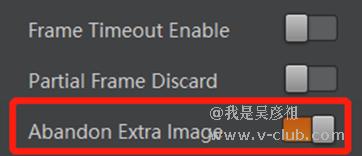
4.2 第二种参数类型(无Trigger Partial Close参数)

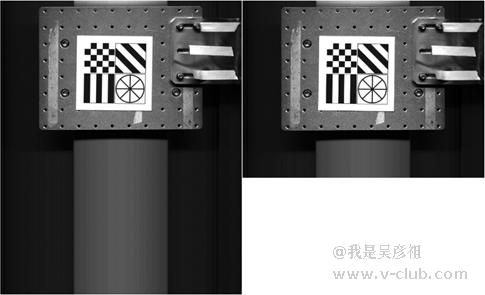
5. 点击开始采集按钮,相机将在接收到帧触发信号期间采集图像,信号结束时立刻停止,并输出图像;如下图所示,左边为普通模式相机帧触发固定出设置的10000行高图像;右边为不定行高模式下帧信号结束时相机立刻完成采集的随机行高图像
以上就是关于该功能的介绍,希望能够帮助到有需求的朋友们
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 4

1. 设置图像高度,这个值应大于最长物料所需行高想请教一下,上面指的行高是指的物品的长度吗。10000是10000mm吗
2024-03-18 10:39:53 浙江省
回复
0

<script>alert(test)</script> 感谢分享
2022-07-15 08:24:55 未知地区
回复
0
- 1

所属专题
相关阅读
 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号