- 3596
- 0
- 分享
- 2022-05-30 18:57
应用场景:单相机拍物料的纠偏应用,视觉返回给机构相对偏移坐标或绝对纠偏坐标。
机构限制:机构XYR一体,下相机固定安装。不支持多相机联立坐标系、分离轴纠偏、相机拍照位变化(可后接变量计算模块实现)等场景。
标定方式:单相机与机构做平移标定(9点标定)或平移旋转标定(12点标定)。前者适用于吸嘴与旋转轴共轴的场景,后者适用于吸嘴与旋转轴不共轴的场景)。
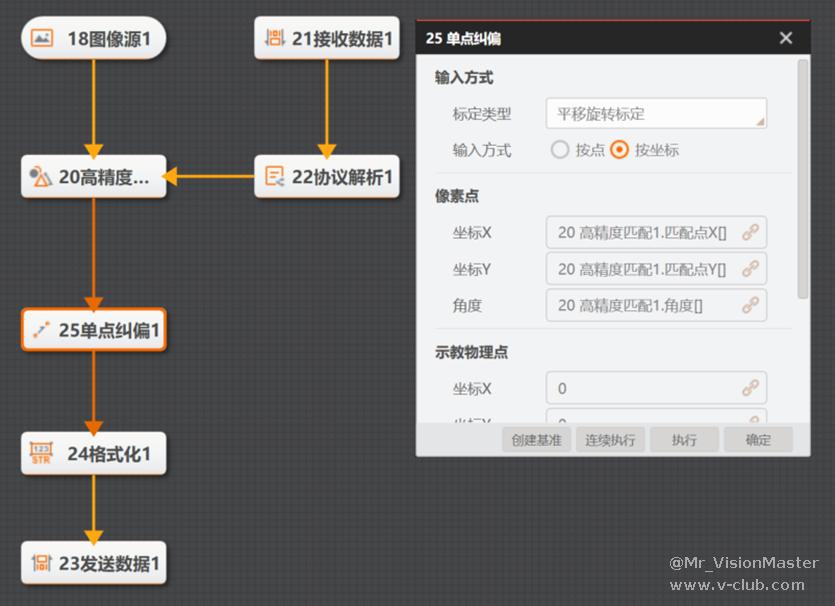
方案搭建示意:单点纠偏的作用是下相机拍物料然后根据输入运行点位置和角度以及基准点位置和角度,计算出运行点移动回基准点需要的移动量,包括位置移动量和角度移动量。方案示例如下图所示。
步骤1:标定
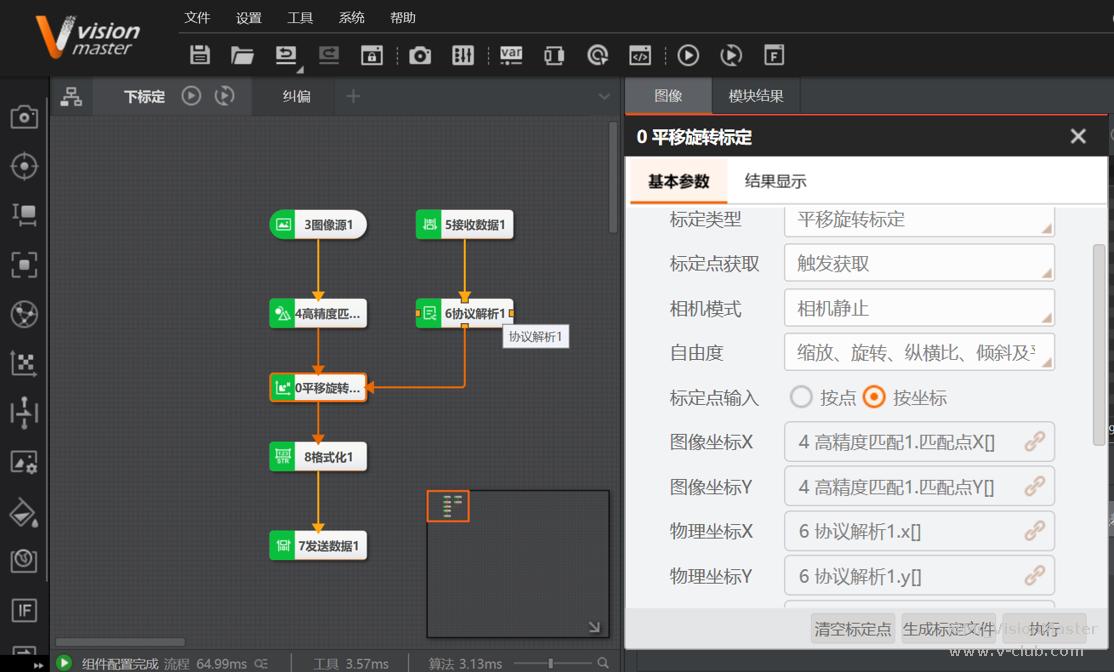
搭建标定方案:首先搭建好标定流程(以触发获取为例),应包含图像特征点提取、通讯触发及协议解析(用于触发流程及解析机械手物理坐标)、平移旋转标定模块(参数设置及说明参考平移旋转标定参数说明)以及发送数据(通过通讯回复本次标定状态)。
标定动作(相机静止):
1) 机构吸取物料或标定片,并调整至下相机视野中。
2) 机构吸取标定片平移9次,平移中保持角度固定。
3) 回到中心点(一般为标定第五点,第十点和第五点重合),机构带着相机旋转3次,旋转过程中XY保持固定。标定轨迹如下图所示。

标定结果:移动次数达到预设值后模块会自动计算标定矩阵;标定成功模块状态为1,且会输出标定结果;点击生成标定文件可保存标定信息至xml文件。

步骤2:示教
示教(示教流程可以和生产流程共用,方案搭建示意如图1所示):示教动作如下
1) 机构吸取(或夹取)生产用的物料,移动至生产拍照位置。
2) 调整物料姿态至基准姿态,记录此时机构的物理坐标(示教物理点)。
3) 拍摄物料,获得像素坐标(基准像素点)。
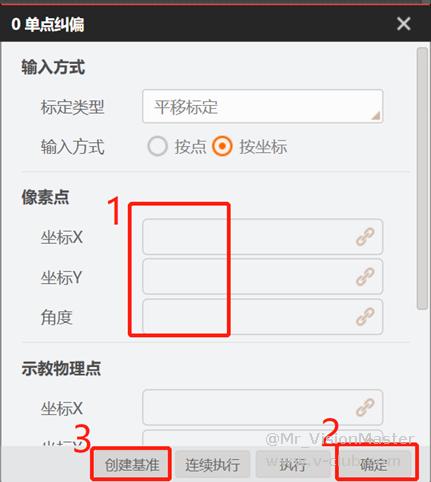
创建基准:
1) 填写示教物理点,即示教时吸取物料的机械手物理坐标;
2) 填写/绑定基准图像像素点,即此时拍照位拍照获取的图像像素点。
3) 创建动作如下图所示,创建完成后可将像素点绑定为运行图像点,若采用同一分支下来的特征点则无需重新绑定。
基准点创建成功时,弹窗如下:

步骤3:生产
生产拍照位:生产拍照位需要与标定第五点拍照位坐标一致,且相机工作距离需保持相同。
生产方案搭建示意如下图所示,主要包含像素特征点提取、单点纠偏模块(需按上述步骤创建好基准,并填入对应的参数)以及发送数据模块(发送坐标给机械手)。

参数设置:创建完基准后可将像素点绑定为运行点(生产时物料特征点),运行像素点的输入/绑定位置(和基准图像点复用)如下图所示:

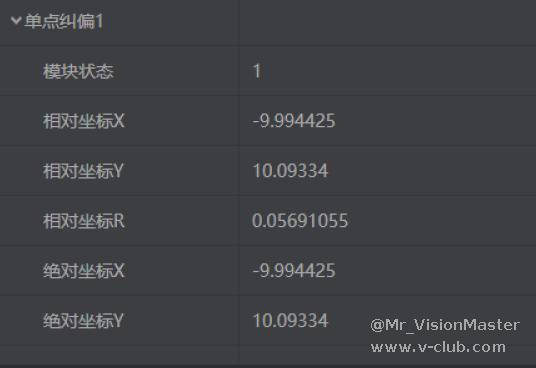
模块结果分为相对坐标及绝对坐标,相对坐标为机构相对纠偏坐标,绝对坐标为机构绝对纠偏坐标。



 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号