


各类标定,都在这里
9篇
- 常见的标定方法简介
- VM应用之平移旋转标定使用
- 3D轮廓仪如何进行系统标定
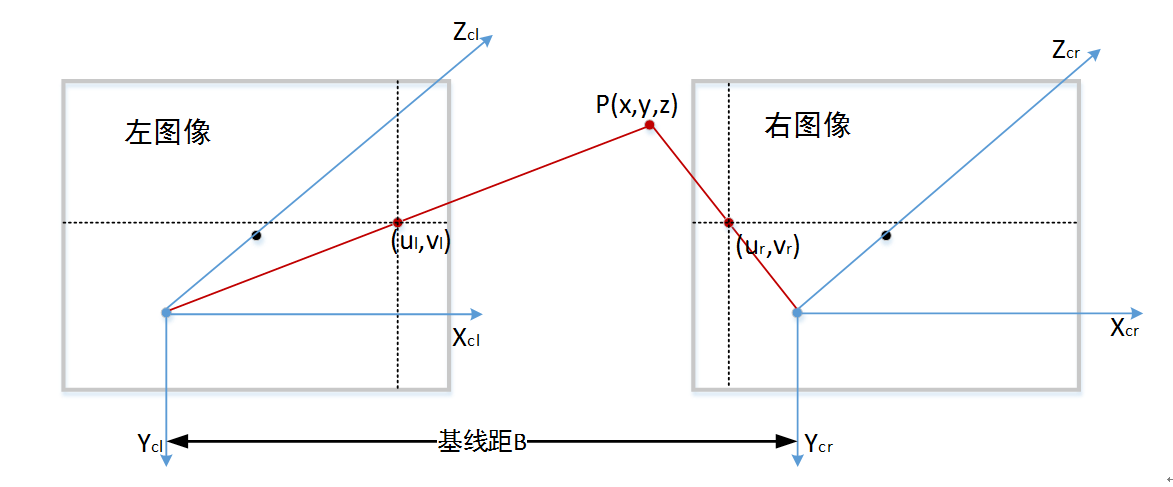
- 双目相机标定原理
- 工程经验系列:视觉定位(标定设计,及应用)
- 浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
- 相机旋转,代替机械爪旋转,标定旋转中心。
- 【共享学习】单相机位与多相机定位分析
- 平移旋转标定模块与绝对坐标
双目标定时不仅标定出两个相机的内参,还要标定出两个相机之间的旋转平移关系。标定得到的内参、外参、畸变系数等,是双目视觉进行图片校正、三维重建恢复的基础。
外参:三个轴的旋转参数分别为(ω、δ、 θ),然后把每个轴的3*3旋转矩阵进行组合(即先矩阵之间相乘),得到集合三个轴旋转信息的R,其大小还是3*3;T的三个轴的平移参数(Tx、Ty、Tz)。R、T组合成成的3*4的矩阵,是转换到标定纸坐标的关键。
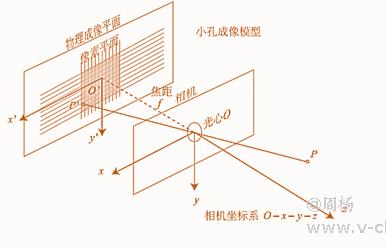
畸变参数是:k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。径向畸变发生在相机坐标系转图像物理坐标系的过程中。而切向畸变是发生在相机制作过程,其是由于感光元平面跟透镜不平行。
在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系。

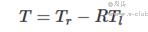
其中,R为两摄像头间的旋转矩阵,T为两摄像头间的平移矩阵。Rr为右摄像头经过张氏标定得到的相对标定物的旋转矩阵,Tr为右摄像头通过张氏标定得到的相对标定物的平移向量。Rl为左摄像头经过张氏标定得到的相对相同标定物的旋转矩阵,Tl为左摄像头经过张氏标定得到的相对相同标定物的平移向量。
通过标定获得的畸变系数,我们可以将图像的畸变消除;通过内参,我们可以变换像素到相机坐标下;通过外参,我们可以变换相机坐标到世界坐标。标定后,双目通过极线校正可以进行光轴的平行,以满足同一目标点在左右图像的同一行上,减少立体匹配的运算量。
这里我们主要介绍张正友标定法。将标定棋盘格放在不同位置和角度进行拍摄,采集的图片数不少于 3 张,一般选用15张左右。
1. 先通过图像处理获得棋盘格的角点,设其像素坐标为[u,v,1]T,设其世界坐标为X,Y,1,设K为相机内参矩阵,r1_,r2,r3 和t分别为相机坐标系相对于世界坐标系的旋转矩阵和平移向量,棋盘格到图像平面的单应性变换为:
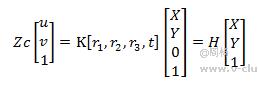
其中设定的相机内参矩阵


2. 根据旋转矩阵的性质


3. 再根据内部参数与映射矩阵求出每幅采集的标定板图像相对于基准图像的旋转矩阵R与平移向量t, 即外参矩阵的参数。对求得的参数根据极大似然原则进行优化,求出极大似然估计值。
4. 将每张图像的控制点根据求解的参数重投影回三维空间,最小化与真实值的差异,建立非线性最小化模型,用LM(Levenberg-Marquardt)迭代算法优化参数。
当然,由于外参矩阵 [r1,r2,t] 和内参矩阵 K 是在有畸变的情况下获得的,这里得到的像素坐标[u,v,1]T并不是完全理想的、无畸变的。我们的总逻辑是,在进行内参矩阵和外参矩阵的求解的时候,我们假设不存在畸变;在进行畸变系数的求解的时候,我们假设求得的内参矩阵和外参矩阵是无误差的。最后,我们再通过L-M算法对于参数进行迭代优化。


1、打印一张棋盘格,配置棋盘格的尺寸和个数。
2、将双目相机对准标定板,通过调整相机或者标定板位姿获取不同位姿的标定板图像约15张左右。
3、对采集的标定图像中棋盘格的角点进行提取,使用张氏标定方案进行标定。
4、解算单相机的畸变、内参和单相机到标定板的外参。
5、对多次计算的双目相机的R、T进行优化,最终得到两相机间的最优估计,提升标定精度。



 浙公网安备 33010802013223号
浙公网安备 33010802013223号