一、.海康VM、OPT的SCI对比
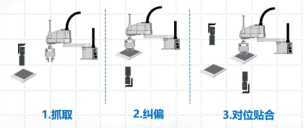
海康VM:对于单相机纠偏,单相机抓取,上下相机对位,集成了模块,目前使用单点纠偏,单点抓取,单点映射对位皆可简易实现。
让定位变得如此简单。参考连接:VM4.0&4.2资料荟萃:https://drive.hikvision.com/hcs/controller/hik-manage/fileDownload?link=lNgmEJx1 提取密码:r150
OPT的SCI:之前使用过,都是用的脚本做的纠偏,对位,二次对位(先纠偏角度,然后再纠偏XY),一次对位。
优势:能让人更理解对位,定位原理,相对比VM的傻瓜式操作,要有一定的数学公式,对比而言,海康VM只是将其封装在工具中,所以用起来只需要看下帮助手册指引,便可完成定位项目搭建。

换我来做,那肯定是选海康的自带工具,方便搭建,不用想脚本。
二、.海康VM的标定工具 VS OPT的SCI的标定工具
1.用过海康的VM做定位,就一定会知道海康技术支持和你说的”12点标定做了归一化处理,旋转中心经过标定转换模块,是(0,0)点“。直到前几天,看了社区的大神“迷糊的虫子”一篇,才真正理解了这个,自己也手动测试了下,做了个小demo,果然如同老哥所说的。
2.很多做机器视觉的人员,都是自己去做9点平移标定+旋转标定,分开计算,那么海康的这个归一化有什么好处呢?那就听我说一说:使用12点标定生成的矩阵,旋转中心像素坐标经过该标定矩阵转化为了(0,0),这样会让旋转更为简单,相当于绕着(0,0)点旋转。这便是好处。

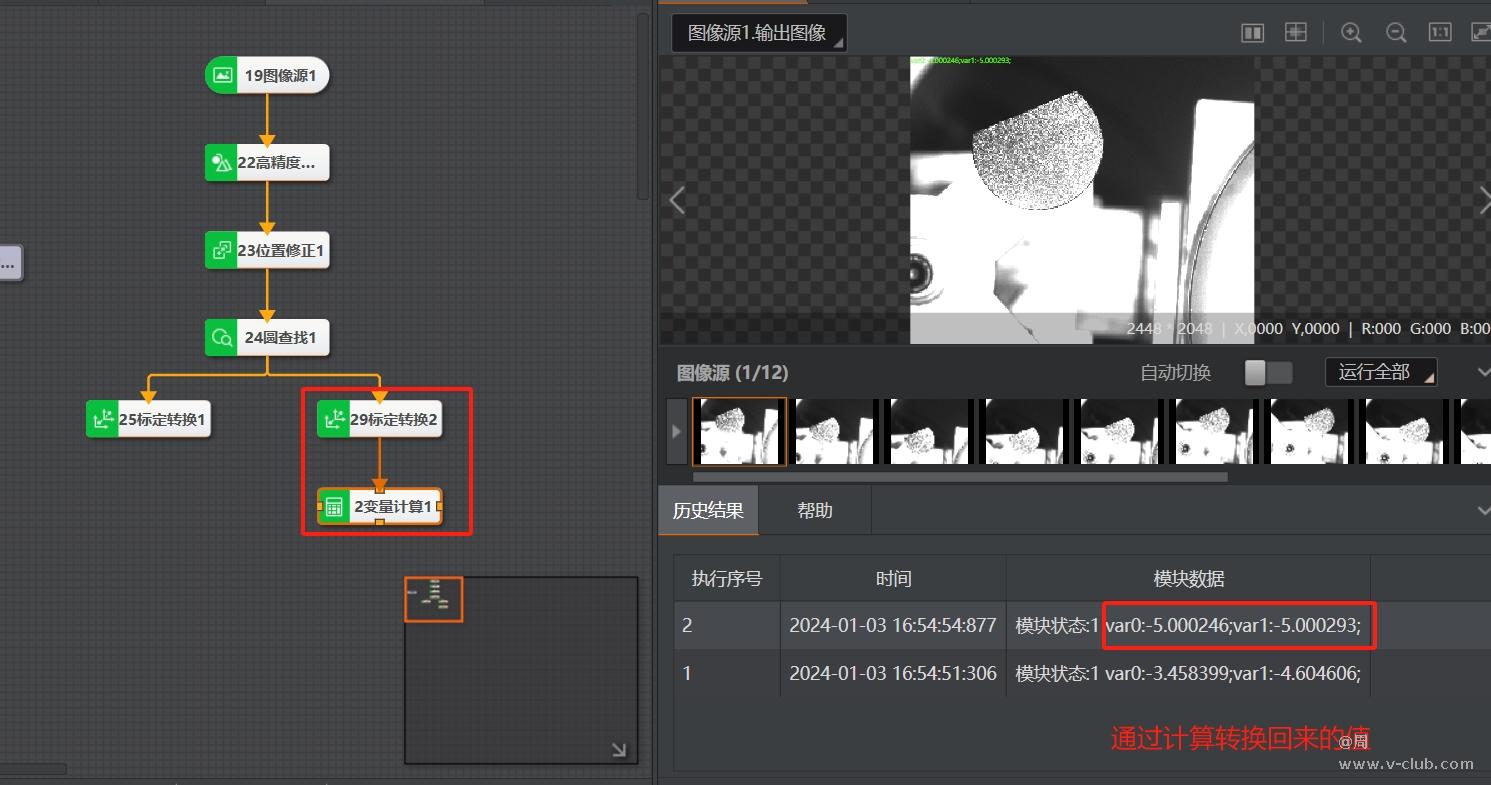
通过上述的demo,也是可以将其转换回来,实操下就知道。
今天就分享下以上两点,下期分享VM的脚本。

附件是归一化转化demo,图片太大上传不过来,谅解。






 浙公网安备 33010802013223号
浙公网安备 33010802013223号