相机掉线响应配置测试
- 2085
- 2
- 分享
- 2023-12-02 10:51
测试多个相机掉线,在线时,向上位机反馈对应字符串。
2个相机是否在线测试,首先建立服务器,如下图:

VM配置,添加设备,建立客户端
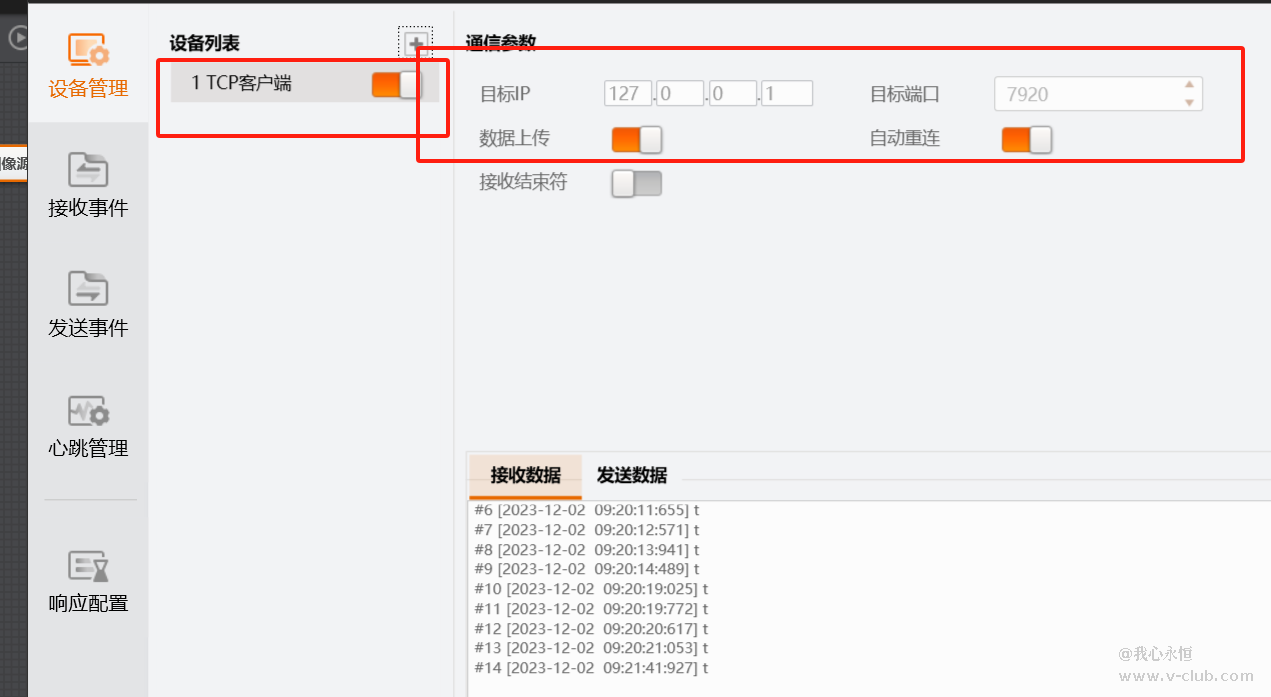
在响应配置中,设置相机在线离线需要向上位机回传的字符串,在本次设置中,相机在线时,自动触发回传ONLINE;相机离线时,自动触发回传OFLIEN.

添加分隔符,
后续自动添加相机的ID,相机ID在全局相机配置中可以看到

在全局触发中设置
、
配置触发字符“t”
新建流程,添加两个相机源,触发设置为软触发。

拔掉全局相机0,触发掉线回传,OFID,0
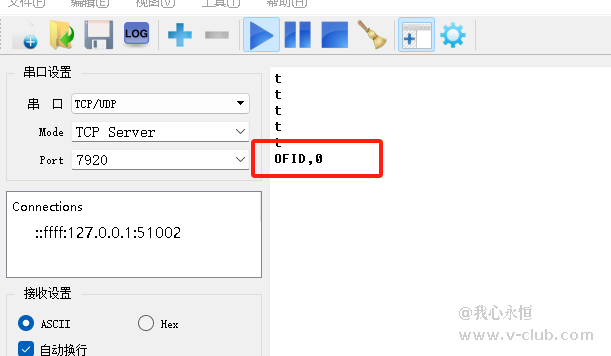
插上全局相机0,则触发回传ONID,0;
全局相机1测试如下

本次测试为两个相机的掉线在线触发返回字符串+分隔符+ID。多个相机同理。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇

下一篇
评论请先登录 登录
全部评论 2


- 1


相关阅读
 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号