Rose补丁升级操作手册
- 560
- 0
- 分享
- 2023-08-09 17:50
Linux项目手动升级rose补丁操作手册
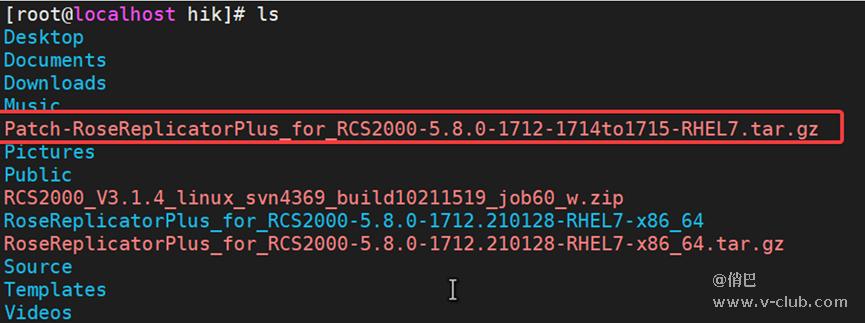
步骤1 上传补丁包到服务器目录下
该文档以上传到/home/hik目录下为例
首先上传补丁包到/home/hik目录下
步骤2 解压上传的补丁包
输入命令tar -zxvf “补丁包名”

步骤3 输入cd命令进入到解压后的补丁包文件夹下
进到补丁包文件夹下会看到patch.sh脚本

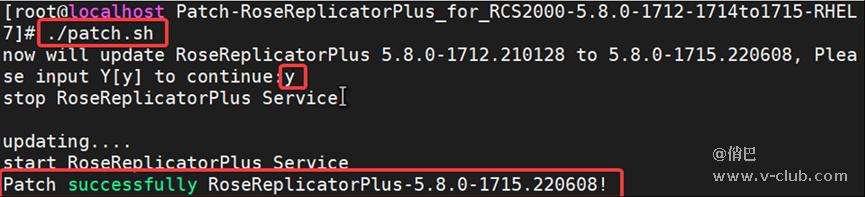
步骤4 运行patch.sh脚本进行补丁包安装
输入命令./patch.sh
输入y按回车键
成功后会显示“Patch successfully RoseReplicatorPlus-5.8.0-1715.220608!”
注意:
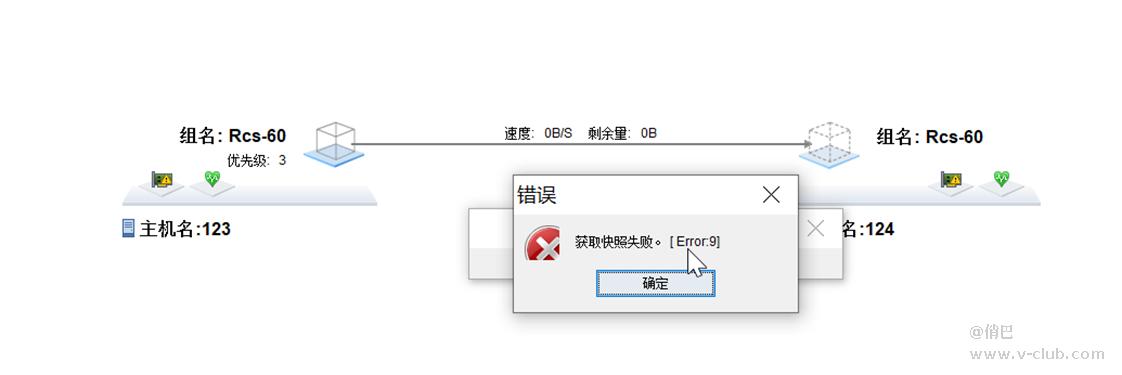
Centos7.9的镜像,在升级到1715版本的时候rose快照功能没有,需要按照下面步骤5到步骤9操作。
步骤5 Centos7.9的系统升级完补丁包到1715版本后rose快照报错
步骤6 上传1715的rose整包到/home/hik目录下

步骤7 解压上传的1715整包
输入命令tar -zxvf RoseReplicatorPlus_for_RCS2000-5.8.0-1715.220608-RHEL7-x86_64.tar.gz

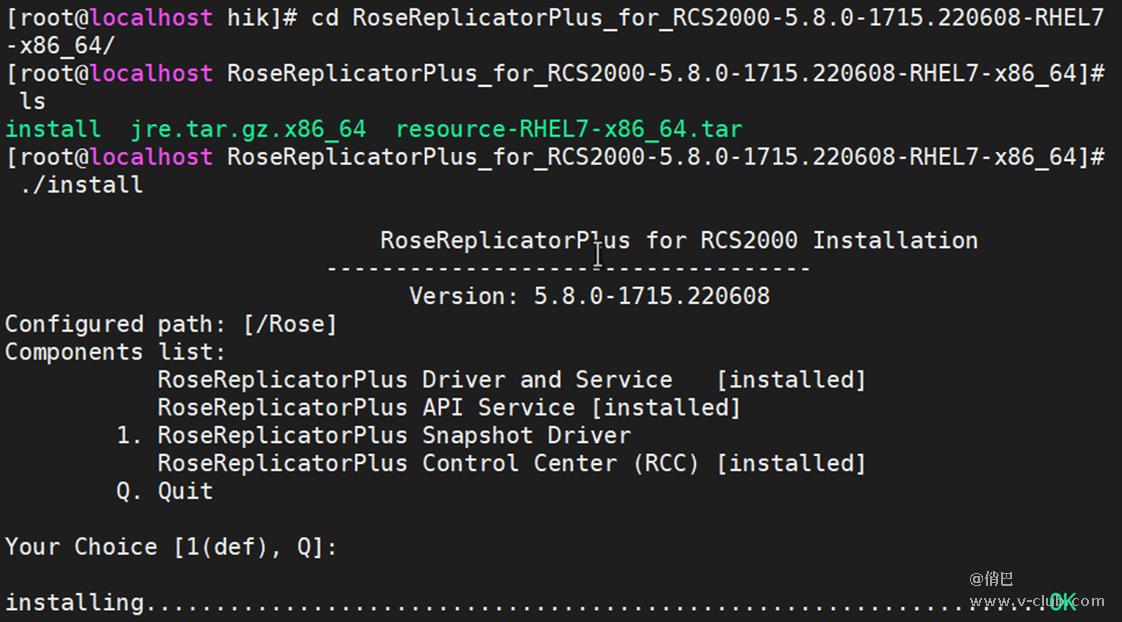
步骤8 切换到解压开的1715整包文件目录下
输入命令cd RoseReplicatorPlus_for_RCS2000-5.8.0-1715.220608-RHEL7-x86_64/
ls看下文件下的文件

步骤9 运行安装脚本安装快照模块
输入命令./install运行安装脚本
直接按回车键开始安装
安装完成后快照配置正常配置即可
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
下一篇
评论请先登录 登录
全部评论 0


相关阅读
 【技术分享】通过脚本来重置变量计算模块中变量的值2024-05-22
【技术分享】通过脚本来重置变量计算模块中变量的值2024-05-22 【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30
【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30 海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13
海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13 【光电传感器基础】—3、光电传感器的基本操作和效果演示2024-05-15
【光电传感器基础】—3、光电传感器的基本操作和效果演示2024-05-15 纸杯机缺陷检测视觉解决方案2024-05-31
纸杯机缺陷检测视觉解决方案2024-05-31
 浙公网安备 33010802013223号
浙公网安备 33010802013223号