关于项目上叉取机器人遇障的案例
- 968
- 0
- 分享
- 2023-07-27 20:13
典型叉取机器人遇障案例介绍,不同遇障场景解决方案分享。
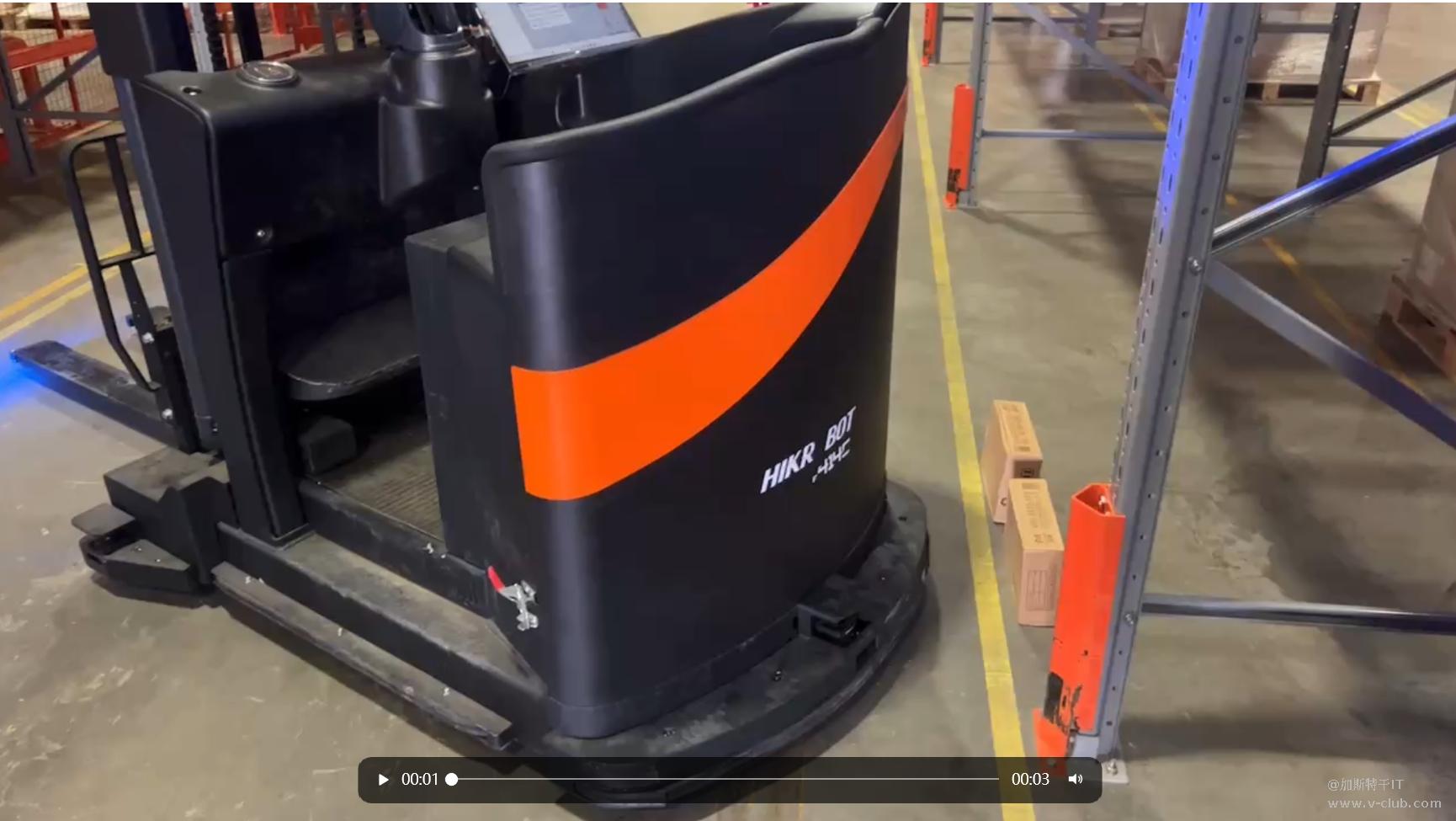
一、窄通道原地旋转遇障
窄通道无法原地旋转报遇障,如下图所示。
遇到该类问题不要慌,首先使用ROBOX观察一波,如下图。
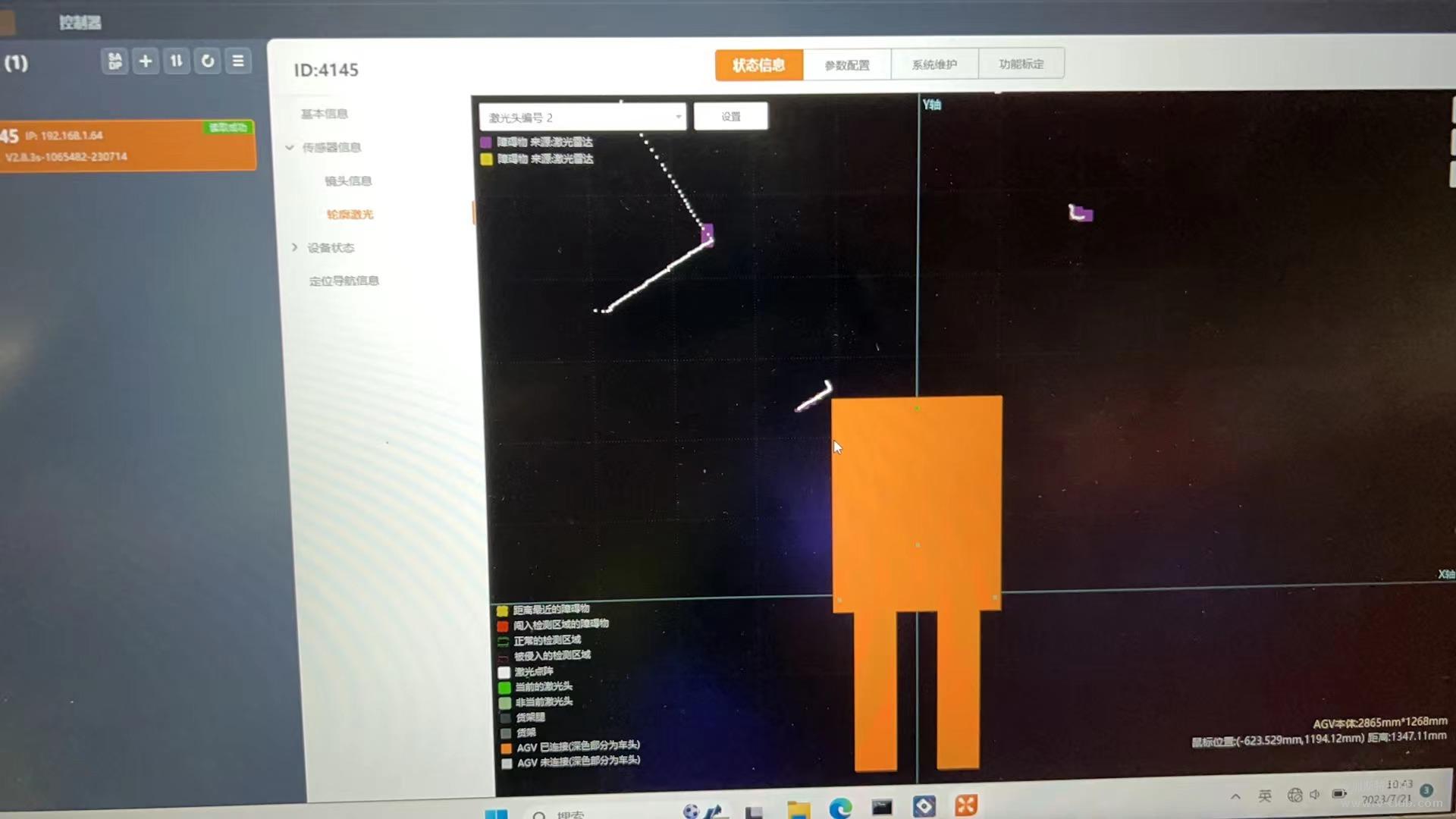
因为激光传感器检测到障碍物导致遇障,该怎么解决呢?
尝试如下方法:
方法一、拓扑地图中需要旋转的拓扑点,关闭点属性传感器(该方法适用主控版本4.X并不适用主控2.8.X),如下图所示,关闭传感器之后可解决该问题。

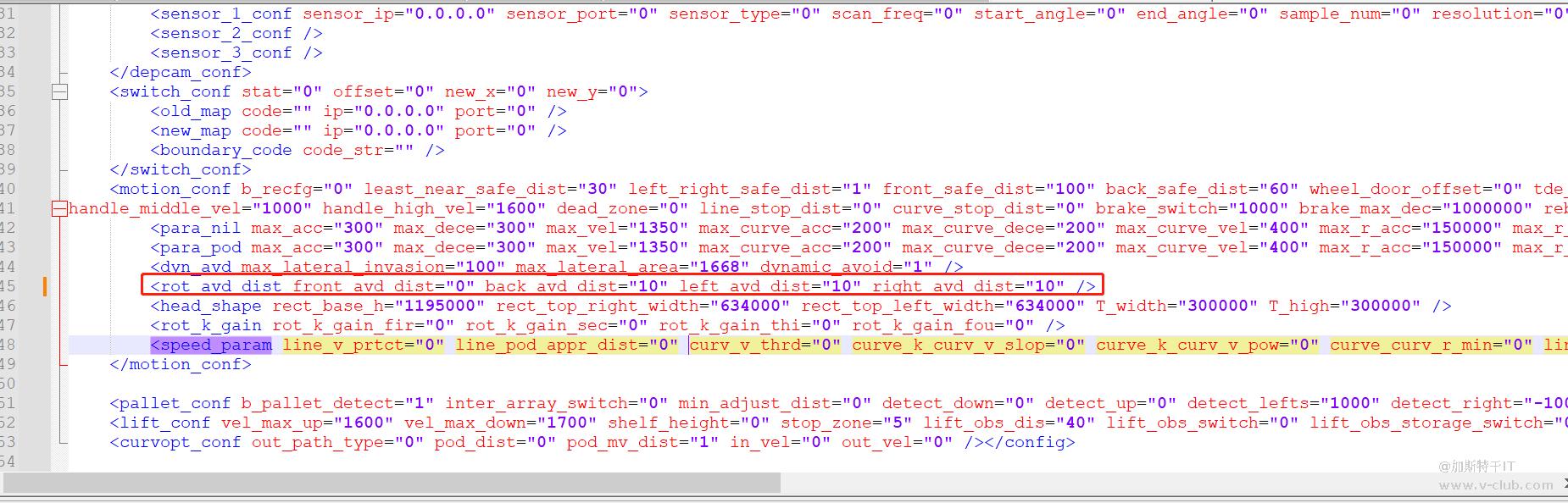
方法二、修改castor_conf.xml文件,如下图所示修改旋转避障方案,可根据实际情况修改这四个值来解决该问题。
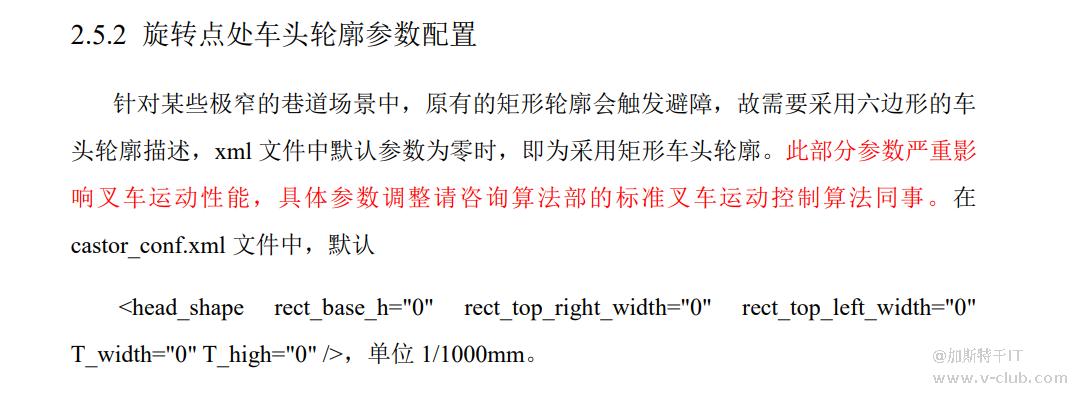
方法三、适用于F6平衡重车型(主控2.8.X版本),方法一和方法二无法解决,修改旋转点处车头轮廓参数配置。
二、取完货出储位报内部遇障
若主控版本为2.8.X版本,需要使用SensView工具回放SENS日志,若主控版本为4.X版本则使用IAS工具进行回放并查看感知库数据。
2.8.X版本取完货出储位报内部遇障,SensView工具回放SENS日志如下。
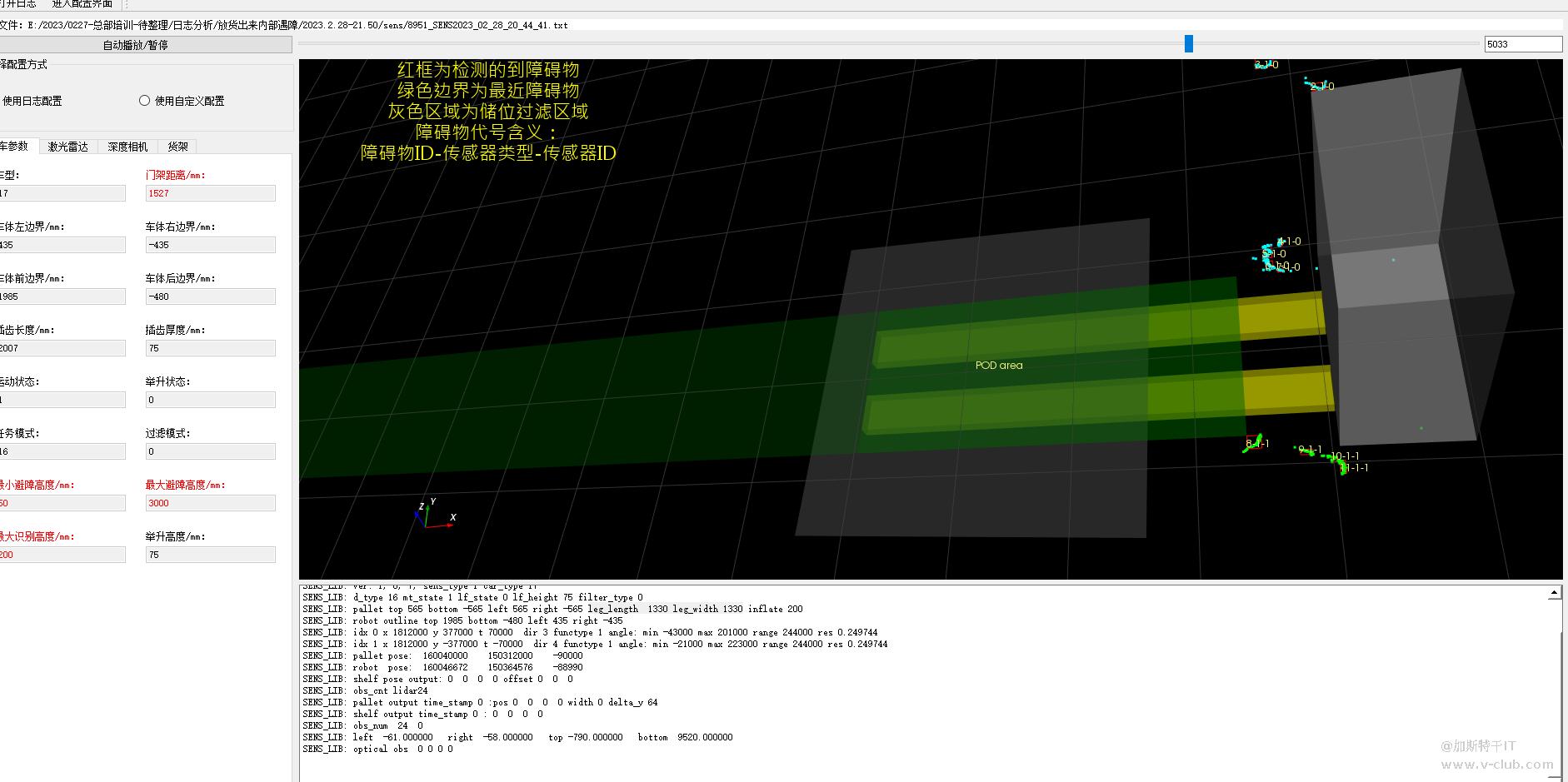
问题原因:回放数据中观察到感知库感知到叉车门架后方有障碍物导致内部遇障,通过查看下面的回放数据pallet pose和robot pose位置基本一致,可以确定实施过程中储位定点有问题,不能简单的把叉车移动到展板所在位置货物传感器压到位之后上报的点作为储位点。
解决方法:通过点位坐标工具来计算储位的坐标点来解决该问题。
三、载货行走报遇障
叉取机器人背起容器会误检测到托盘报遇障,如下图。

通过Robox工具查看传感器状态信息。
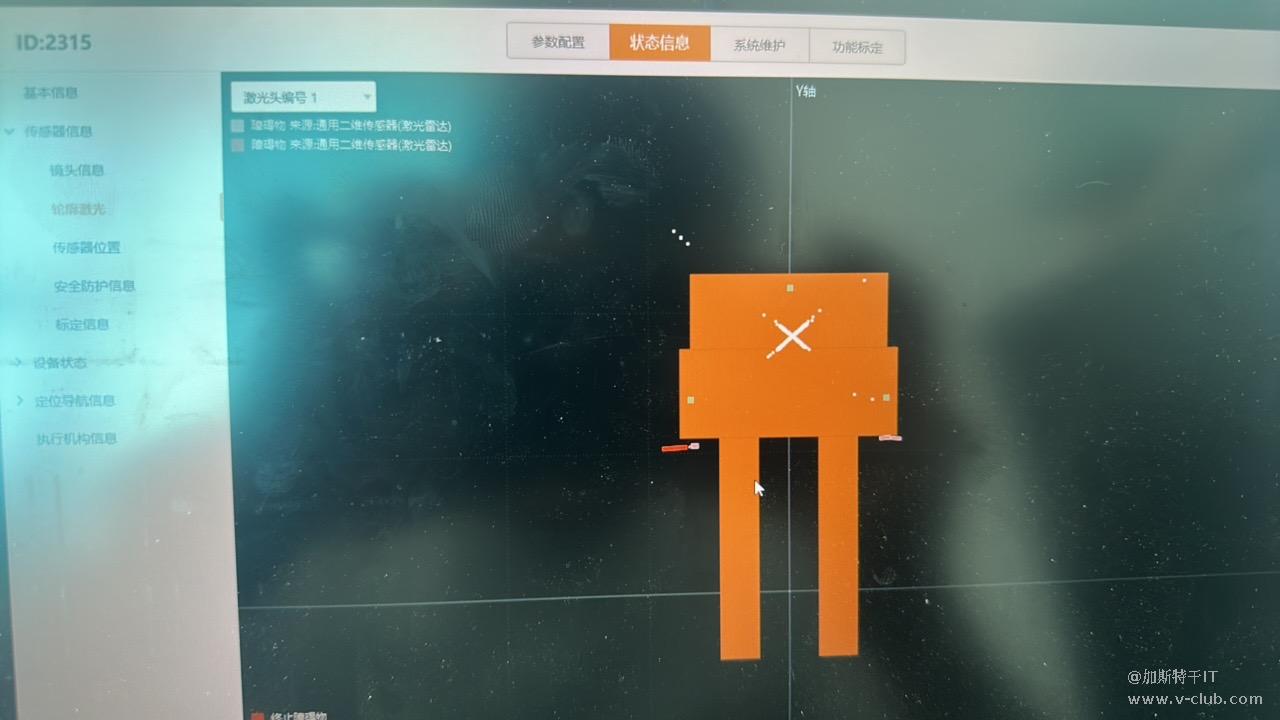
问题原因:激光传感器检测到容器导致遇障碍,检查AGV类型配置中的“载货行走高度”,一般避障激光检测高度为140mm左右,若载货行走高度设置200mm左右,因为容器有部分腿高会挡住避障激光检测面导致遇障。
解决方法:检查AGV类型配置中的“载货行走高度”,一般配置300mm左右。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
已经是第一篇啦~
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0


相关阅读
 第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18
第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18- 第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18
 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26- 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
 海康机器人料箱初级工程师认证学习资料2024-09-09
海康机器人料箱初级工程师认证学习资料2024-09-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号