任务空闲之目标点错误
- 648
- 0
- 分享
- 2023-06-30 16:02
任务空闲之目标点错误
1.1 问题现象
叉取机器人运行到叉车等待点抬完叉尺之后不动作,监控显示任务空闲或者报目标点不可达。
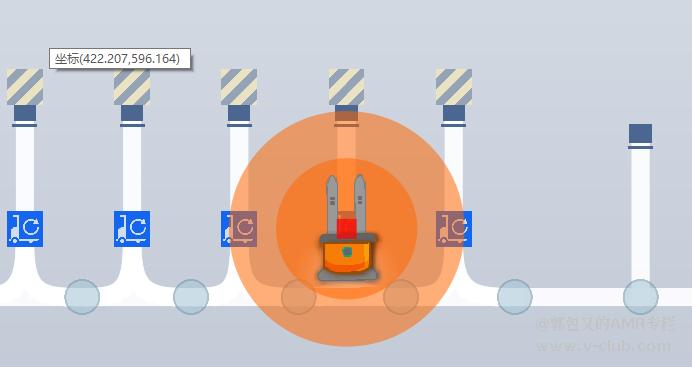
图1-1
1.2 报错原因
RCS塞给规划库的目标点既不在点上也不在线上。
检查办法:监控上查看任务目标点,确定目标点是否在点或线上。
1.3 引起错误原因
1.3.1 点位方向未设置
叉车等待点及储位点属性未设置点位方向,导致当RCS能力集在开启叉车偏移误差的前提下,RCS计算偏移之后的目标点在X轴核Y轴上都进行了偏移,致使目标点不在点或线上。RCS日志体现如图1-2

图1-2
1.3.2 解决方法
叉车等待点及储位设置点位方向。
1.3.3 未画障碍区
在开启叉车偏移误差的前提下,RCS下发的目标点是根据点位方向在储位坐标X轴或Y轴其中一个方向进行偏移。所以叉车取放货的目标点一般都在线上,当现场未障碍区或者障碍区距离储位间距小于偏移阀值,会导致目标点不在线上或点上。如图1-3为错误范例

图1-3
1.3.4 解决方法
绘制障碍区,参照图1-1,并确保障碍区与工作台间距。距离可通过将叉取机器人遥控到储位货物传感器完全接触栈板,机器人上报的坐标+运行方向10cm误差值作为障碍区的坐标。
1.4 总结
叉取机器人在确定储位坐标及绘制地图的时候要严格按照规范操作,特别注意的几个点如下
- 储位点坐标确定
- 点位方向设置(巷道缓存区无需设置)
- 障碍区点位的绘制
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
已经是第一篇啦~
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0

相关阅读
 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 双车联动调试案例-华工中试基地2024-04-28
双车联动调试案例-华工中试基地2024-04-28- VM虚拟机部署欧拉系统及磁盘扩容2024-04-25
 浙公网安备 33010802013223号
浙公网安备 33010802013223号