ROSE模式下多RCS服务配置
- 678
- 0
- 分享
- 2023-06-26 16:59
本文简单介绍ROSE模式下如何部署多RCS服务,ROSE双机模式下部署多RCS服务与单机部署多RCS服务的区别。
说明:
目前部分技术人员对于rose模式下如何部署多rcs服务存在较多疑问,本文简单与大家分享如何在rose模式下部署多rcs服务,rose模式下需分别在两台服务器上单独部署多rcs服务,然后再进行rose的相关配置。
1、登录运管平台,找到路径:系统维护-软件包管理。

2、选择标识为 rcs 的组件,点击安装,选择“自定义安装”,选择主机进行安装。

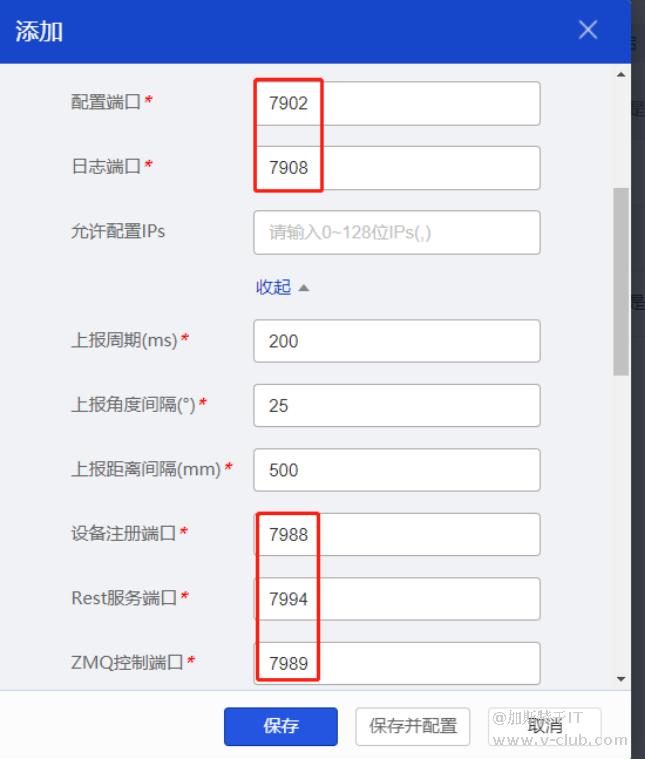
3、修改端口,端口需要是 4 位数的,建议有规律性,该步骤举例把第一位的 8 都改为 7,
点击确定。

4、确认是否安装成功。
6、使用终端工具登录服务器,在 rcs.xml 修改rcs的端口,目前运管平台没有把 rcs新增的端口自动配置下发到 rcs.xml 中,需手动修改配置文件 rcs.xml 中的端口。

7、修改rcs.2服务文件夹下的配置文件。
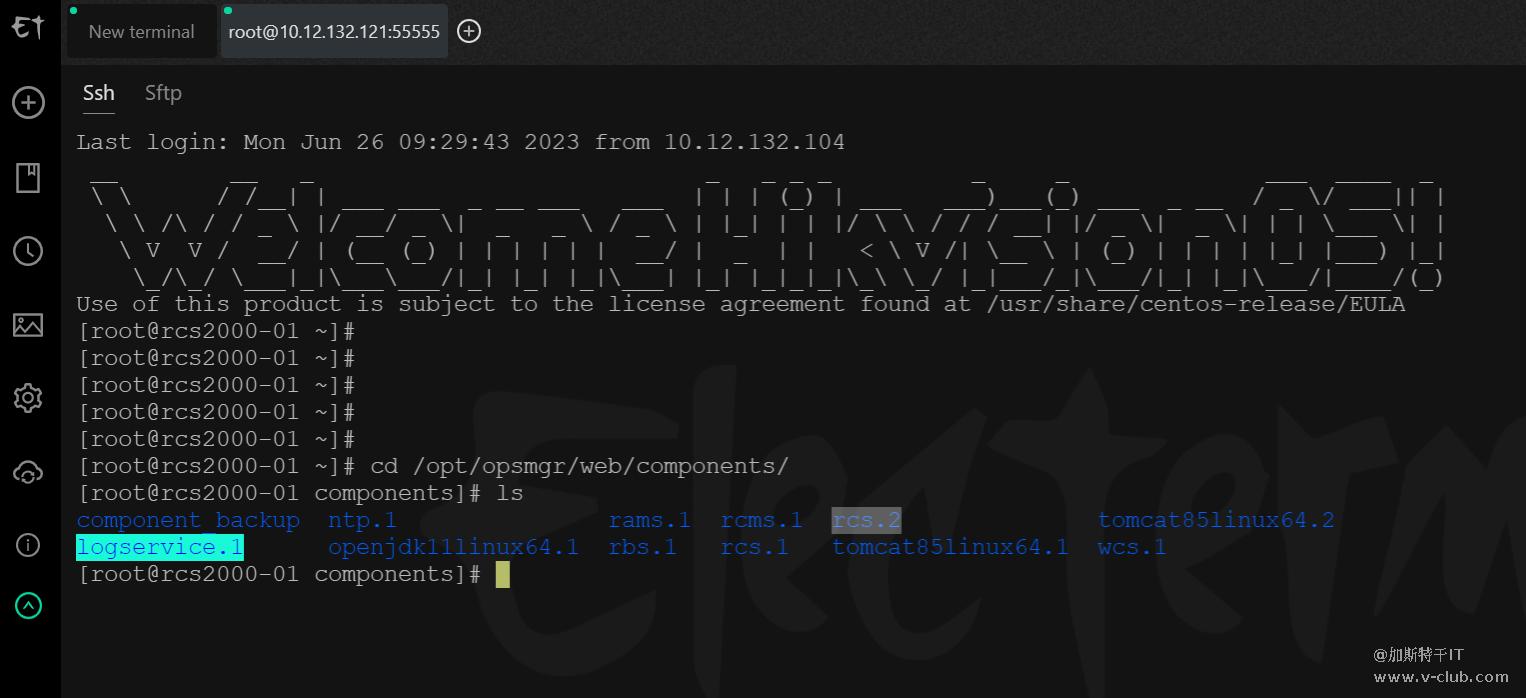
8、切换到 rcs.2 的 rcs.xml 文件所在目录:cd rcs.2/bin/rcs。
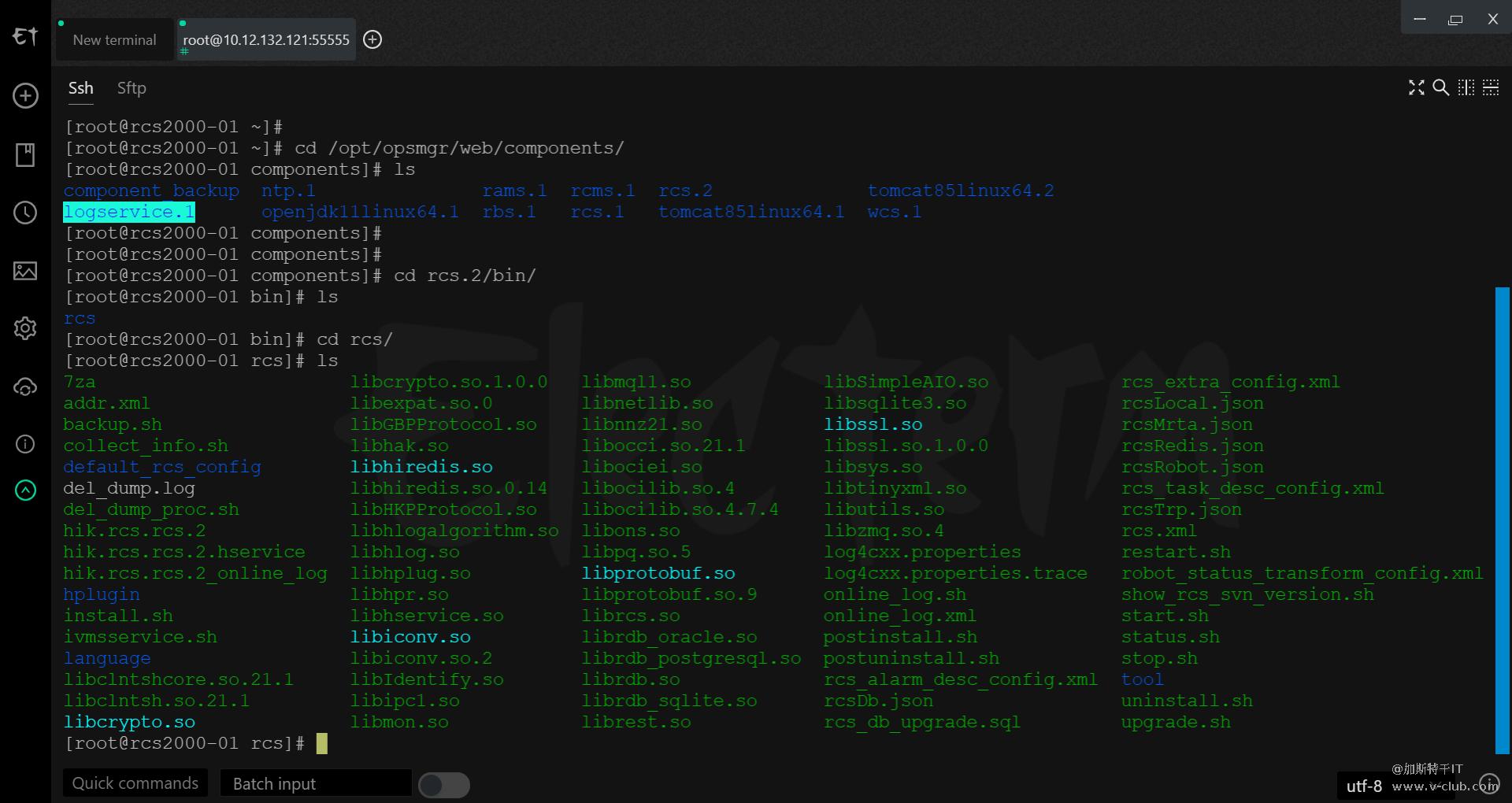
9、修改rcs.xml文件对应的端口信息。

10、rcs.xml修改对应端口之后,需要在web端添加rcs服务。
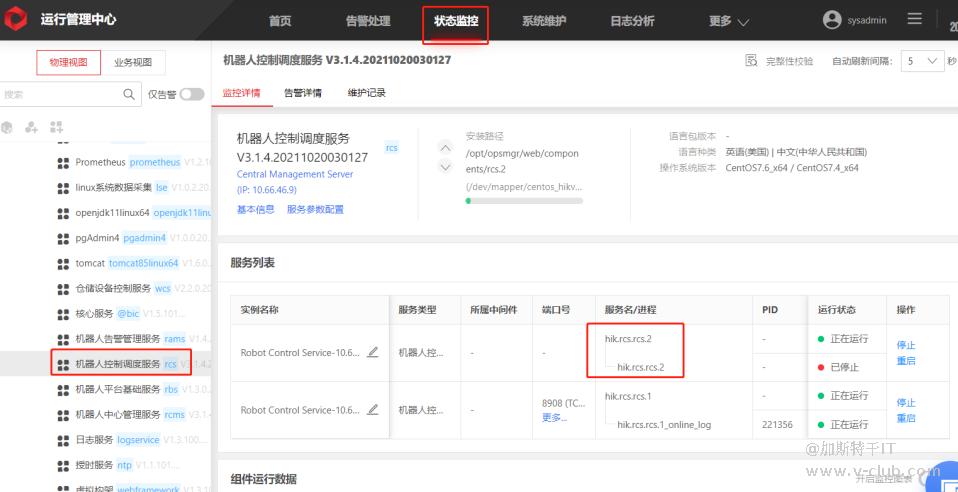
11、rcs服务添加成功后远程配置服务检查是否能够成功。

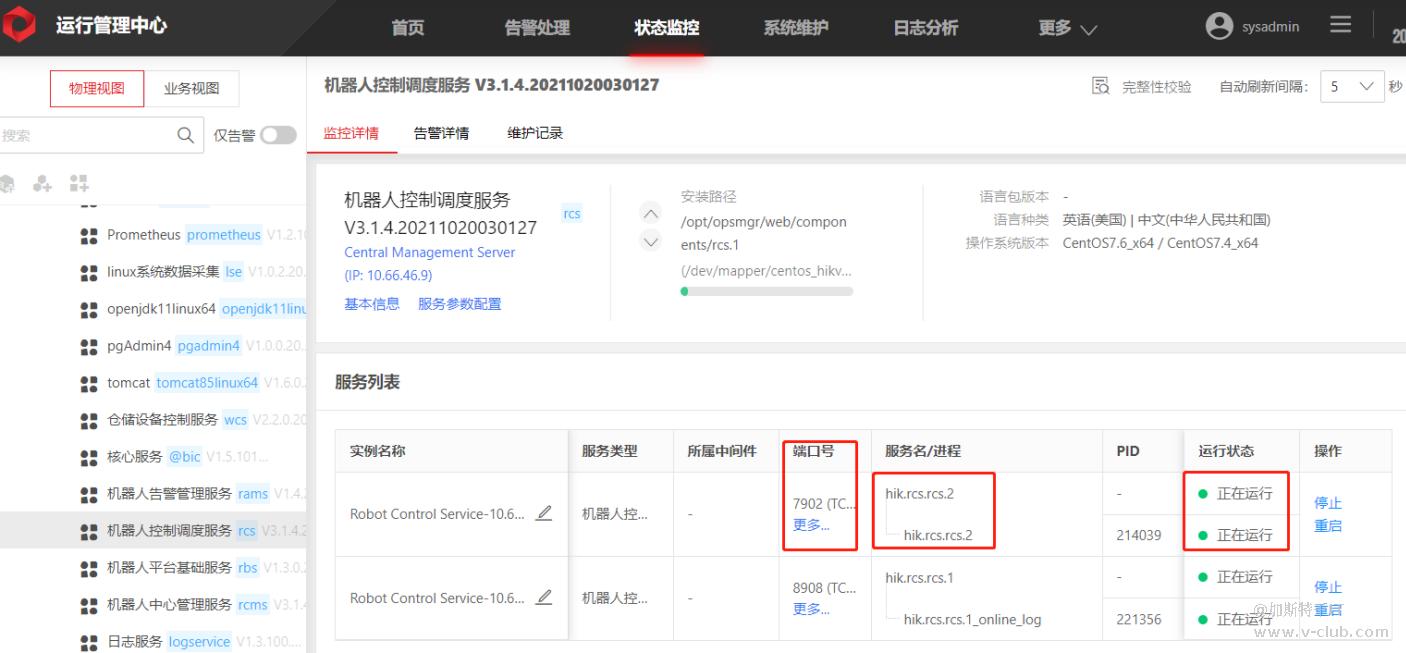
12、运管上查看rcs服务状态为正在运行,则表示添加成功。
13、主备机单独部署完rcs服务后,在rose中配置新添加的rcs服务。

版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
已经是第一篇啦~
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0


相关阅读
 第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18
第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18- 第三届‘悉灵杯’基于MV-DT01SDU相机获取深度图和彩色图2024-09-18
 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26- 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
 海康机器人料箱初级工程师认证学习资料2024-09-09
海康机器人料箱初级工程师认证学习资料2024-09-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号