纹理弧线扫图实现方式优化
- 649
- 0
- 分享
- 2023-05-29 09:53
纹理弧线扫图实现方式优化
背景
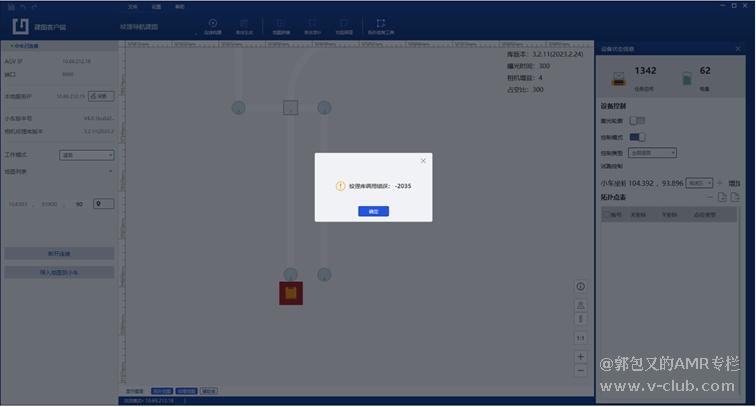
大家在建图过程中,可能会遇到SLAM客户端报错(如下图:2203/2035/2237,该报错大多为为建图时实施或配置问题),检查配置又难以发现异常点,无从下手;在本文中,将介绍一种较为简单的方式进行纹理建图。


实现方式
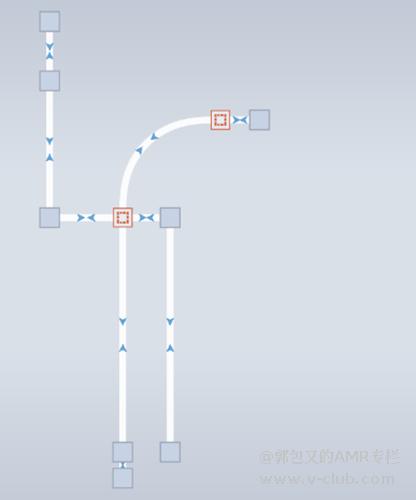
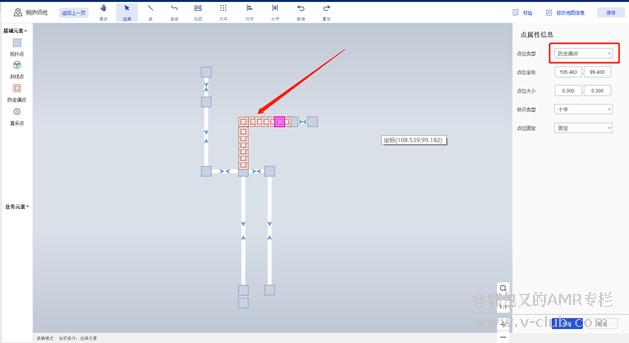
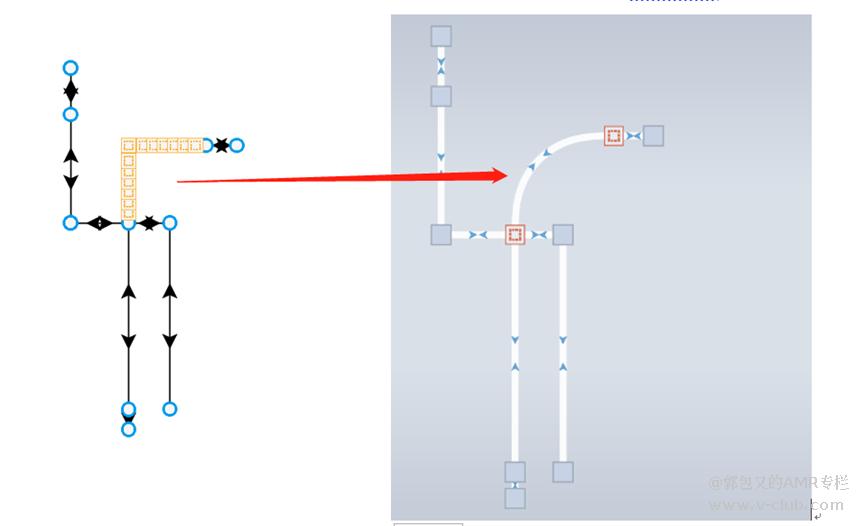
原理:在需要添加弧线的路段上,先以直线的方式添加两条互相垂直的直线,如下图;在直线上每隔20cm加一个防走偏点,在AGV扫图时,小车会在每一个放走偏点上来回扫图采集足量的纹理点,扫图结束后在拓扑图上将直线改为自己需要的弧线即可。
注意:每一个放走偏点上需贴上对应标识,若使用十字则用色带贴上十字,若使用二维码则贴上二维码。
注意要点
- 连续建图时,SLAM客户端推荐更新至最新版本测试;
- 建图时,小车协议需要改为V1,目前VSLAM建图仅支持V1协议;对于3.x/4.x版本的主控,没有特殊要求时,一般搭配平台使用V2协议,在建图结束后需要改为V2协议,协议不对则可能会出现小车不执行指令的场景;
- 点位是否固定,选择固定,则采集的纹理点坐标与建图拓扑地图坐标保持一致,但对实施时距离测量 和贴码精度要求较高;选择不固定,算法会根据建图时采集的纹理点计算坐标,因此 纹理点坐标与建图拓扑地图坐标存在一定差距,需要保存定位拓扑地图,以供平台使用。一般推荐使用不固定,仅导航模式切换的点位需要选择固定;若选择不固定,但扫图结束后未更新地图,可能会出现客户端无法打开纹理地图或走偏等情况;
- SLAM客户端建图时,AGV的平台IP和端口会被修改为SLAM客户端的IP和端口,建图结束需要改为对应的RCS IP的端口。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
已经是第一篇啦~
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0

相关阅读
 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 双车联动调试案例-华工中试基地2024-04-28
双车联动调试案例-华工中试基地2024-04-28- VM虚拟机部署欧拉系统及磁盘扩容2024-04-25
 浙公网安备 33010802013223号
浙公网安备 33010802013223号