如何排查进机台走偏问题
- 626
- 0
- 分享
- 2023-05-26 10:36
如何排查进机台走偏问题
场景
SLAM机器人进机台时,总是往一边走偏。
排查方法
可通过交叉测试的方法进行验证。
1、纯slam导航进机台
通过与其他机器人对比验证,若是多台车走偏,优先进行地图核查,排查slam地图的问题;若是单台车走偏,其他车正常,优先进行一体化标定(导航激光)。
2、贴辅助码进机台
(1)盖住二维码,让机器人靠纯slam进机台,观察是否走偏;若会走偏,按1中方法进一步验证是地图问题还是激光标定的问题。
(2)机器人导航方式选择二维码,进机台,观察是否走偏;若会走偏,则要么是码贴的有问题,要么是下镜头有问题;接着可通过与其他机器人对比测试验证,若是单台机器人存在问题,大概率是下镜头有问题,需进行下镜头标定;若是多台机器人存在问题,重点检查码是否贴歪。
场景案例:现场单台slam机器人进机台总往左偏,其他机器人均正常。进机台贴了辅助码。
排查过程
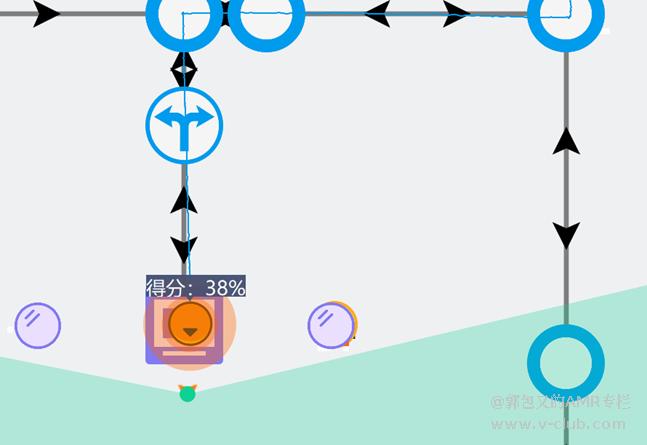
步骤1:通过mapstudio核查地图,如下图1,发现机器人进机台过程中,开始行走没问题,过了第一个点扫到码后开始走偏。
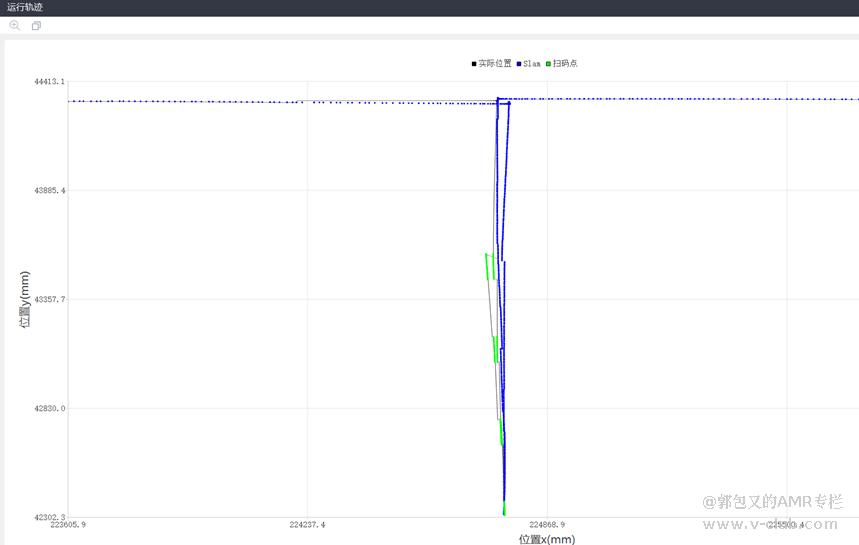
步骤2:通过IAS回放,如下图2,绿色是二维码坐标,蓝色是slam坐标,发现二维码和slam的坐标分离了。初步判断是扫到码后导致的问题,可能是码贴的有问题,或者是下镜头存在问题。
步骤3:现场按2中方法交叉验证后,得出结论:是机器人下镜头存在问题。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
已经是第一篇啦~
下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0

相关阅读
 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 双车联动调试案例-华工中试基地2024-04-28
双车联动调试案例-华工中试基地2024-04-28- VM虚拟机部署欧拉系统及磁盘扩容2024-04-25
 浙公网安备 33010802013223号
浙公网安备 33010802013223号