
各类标定,都在这里
9篇
- 常见的标定方法简介
- VM应用之平移旋转标定使用
- 3D轮廓仪如何进行系统标定
- 双目相机标定原理
- 工程经验系列:视觉定位(标定设计,及应用)
- 浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
- 相机旋转,代替机械爪旋转,标定旋转中心。
- 【共享学习】单相机位与多相机定位分析
- 平移旋转标定模块与绝对坐标
简单分享一下现阶段我在项目应用的标定方式,主要的内容是参考V学院的培训-中级-VM 标定与定位技术,利用下相机对机械手抓取产品进行平移旋转标定(12点标定)。
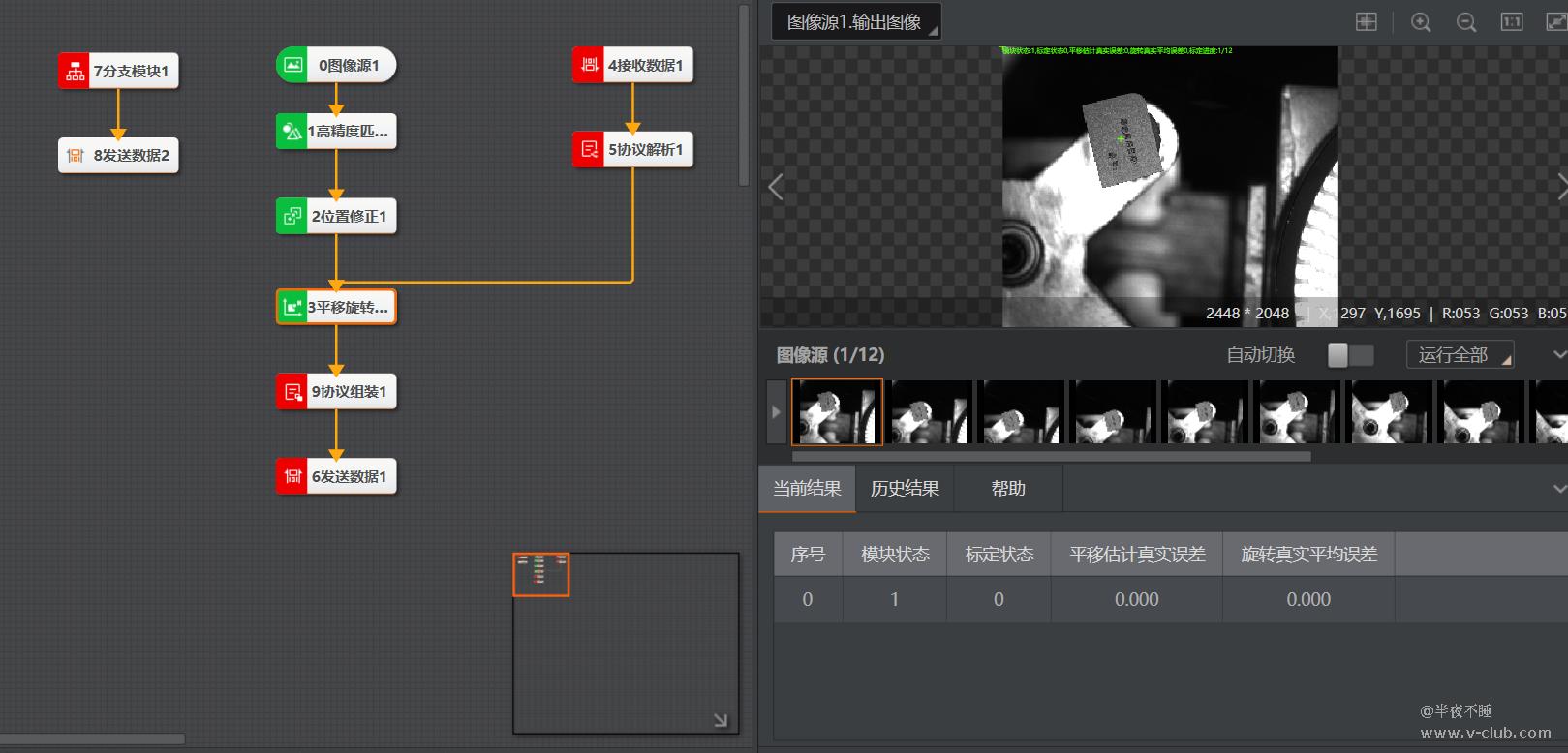
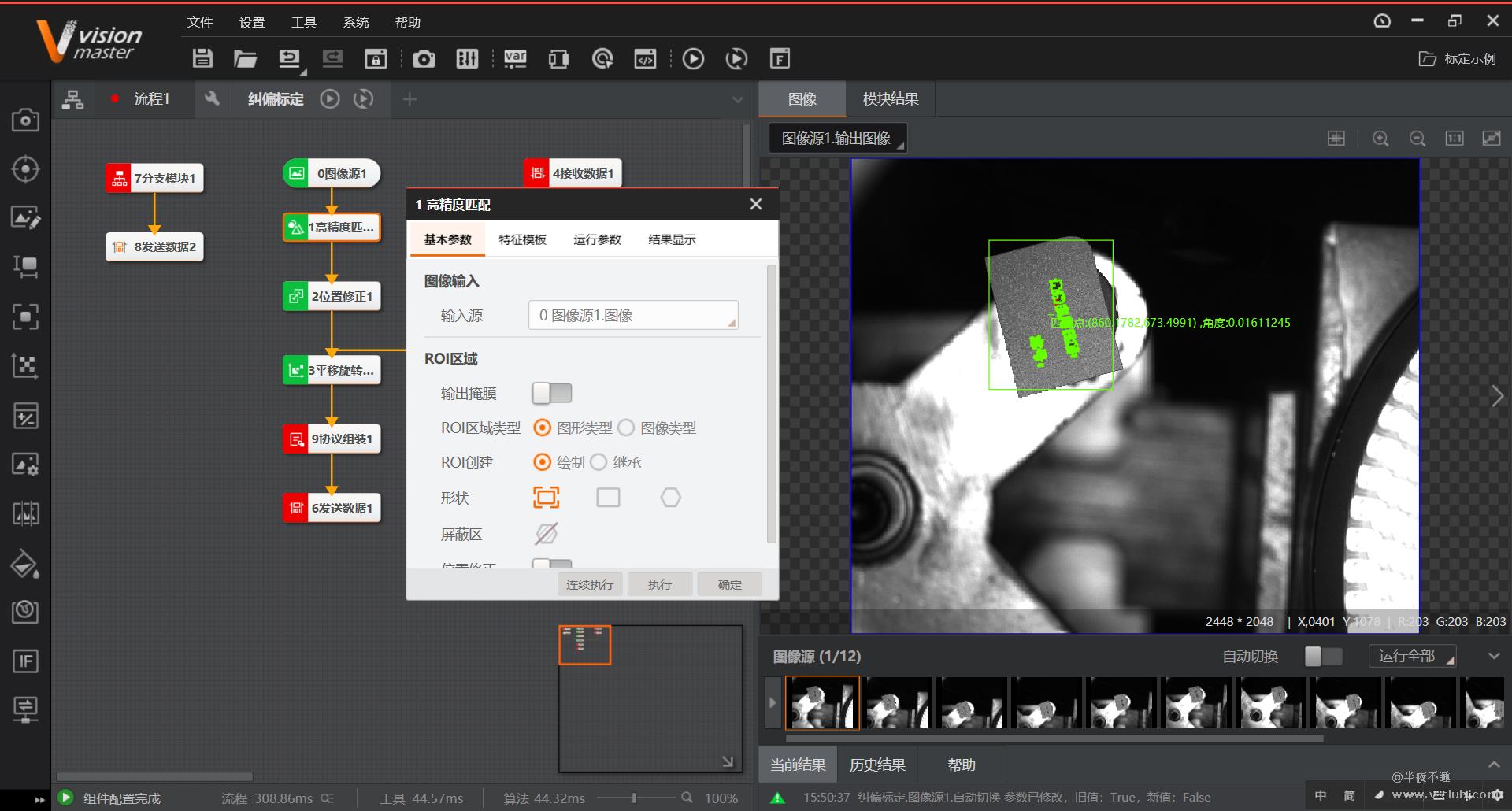
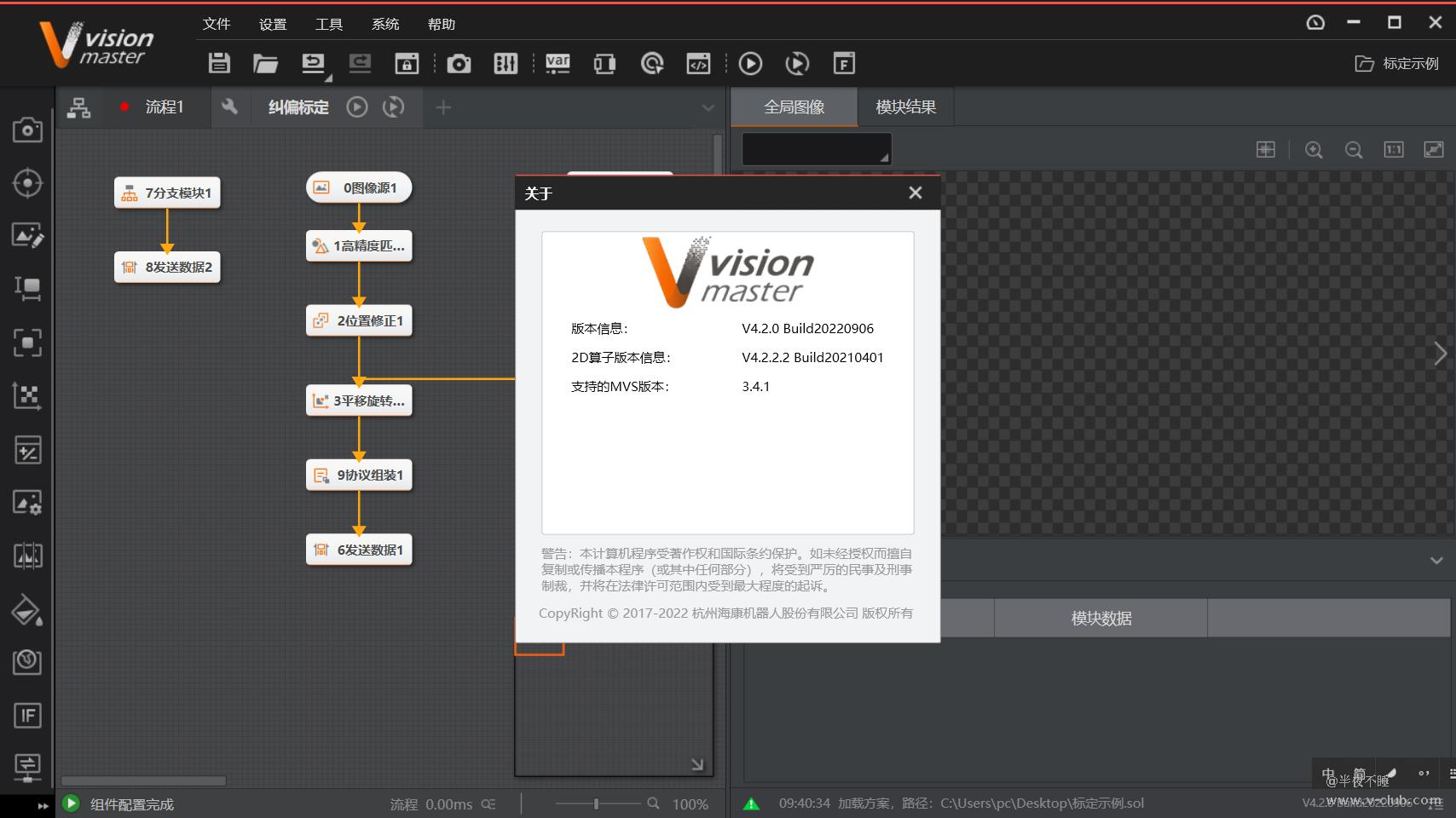
1.整体标定流程如图所示,内容对应V学院的有所增加
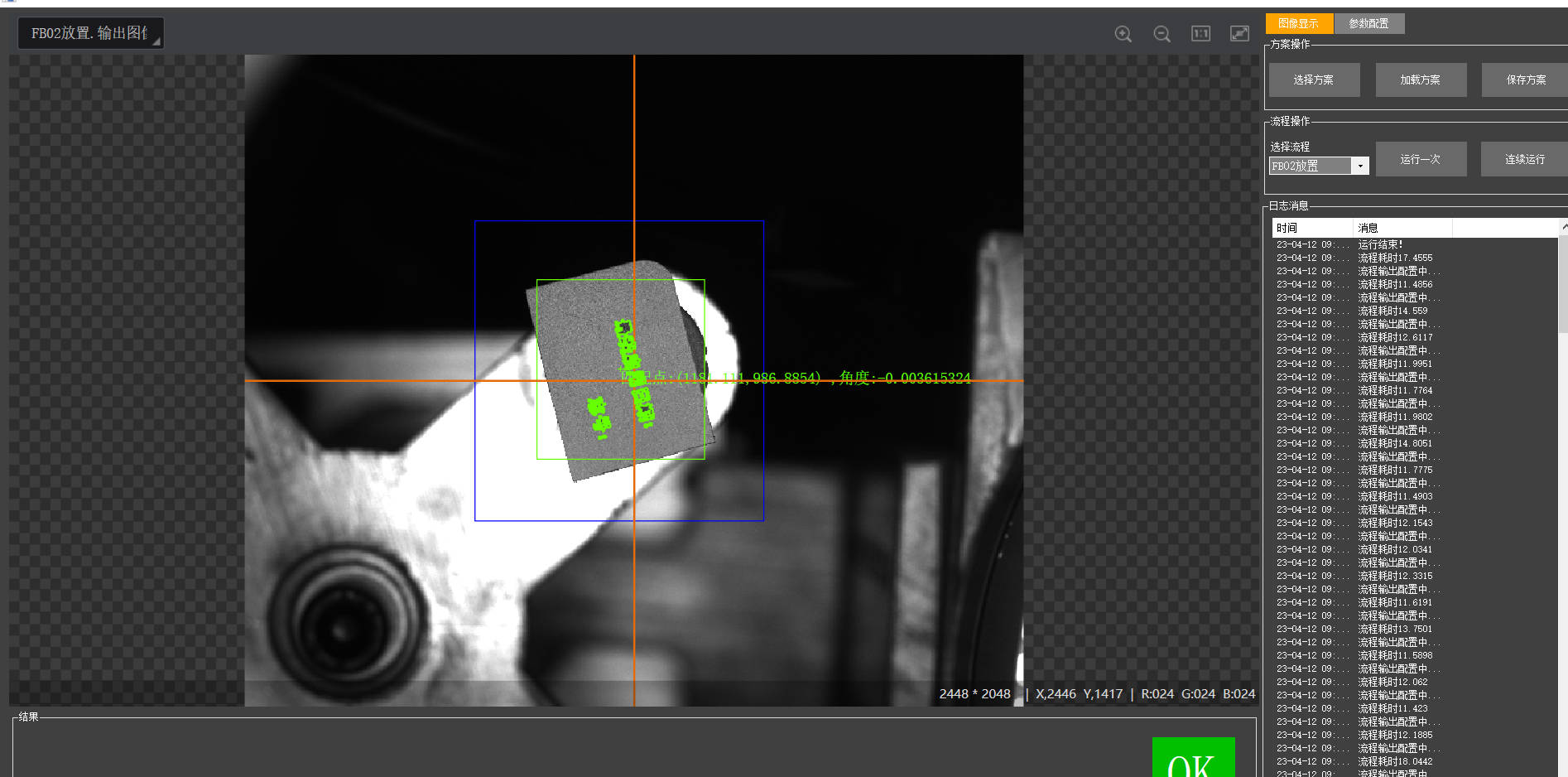
2.高精度模块将需要标定的产品MRAK点做好
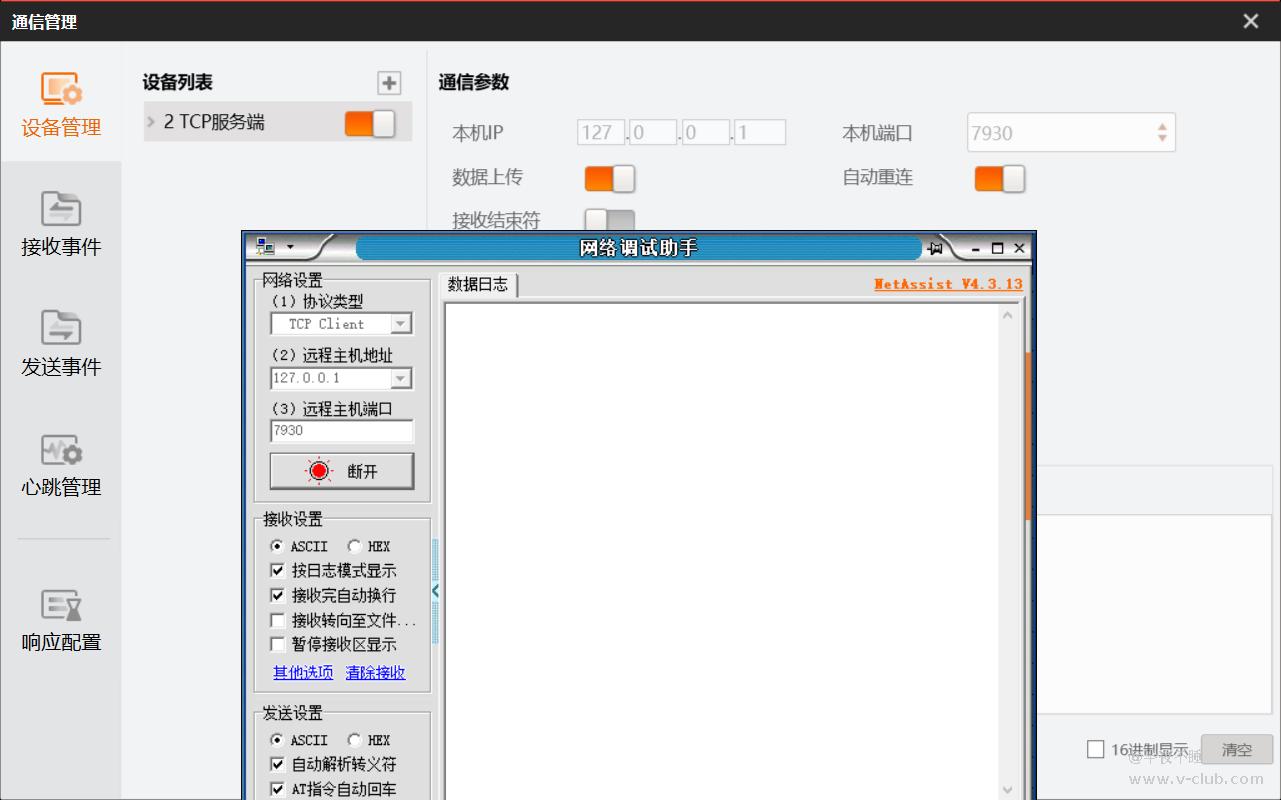
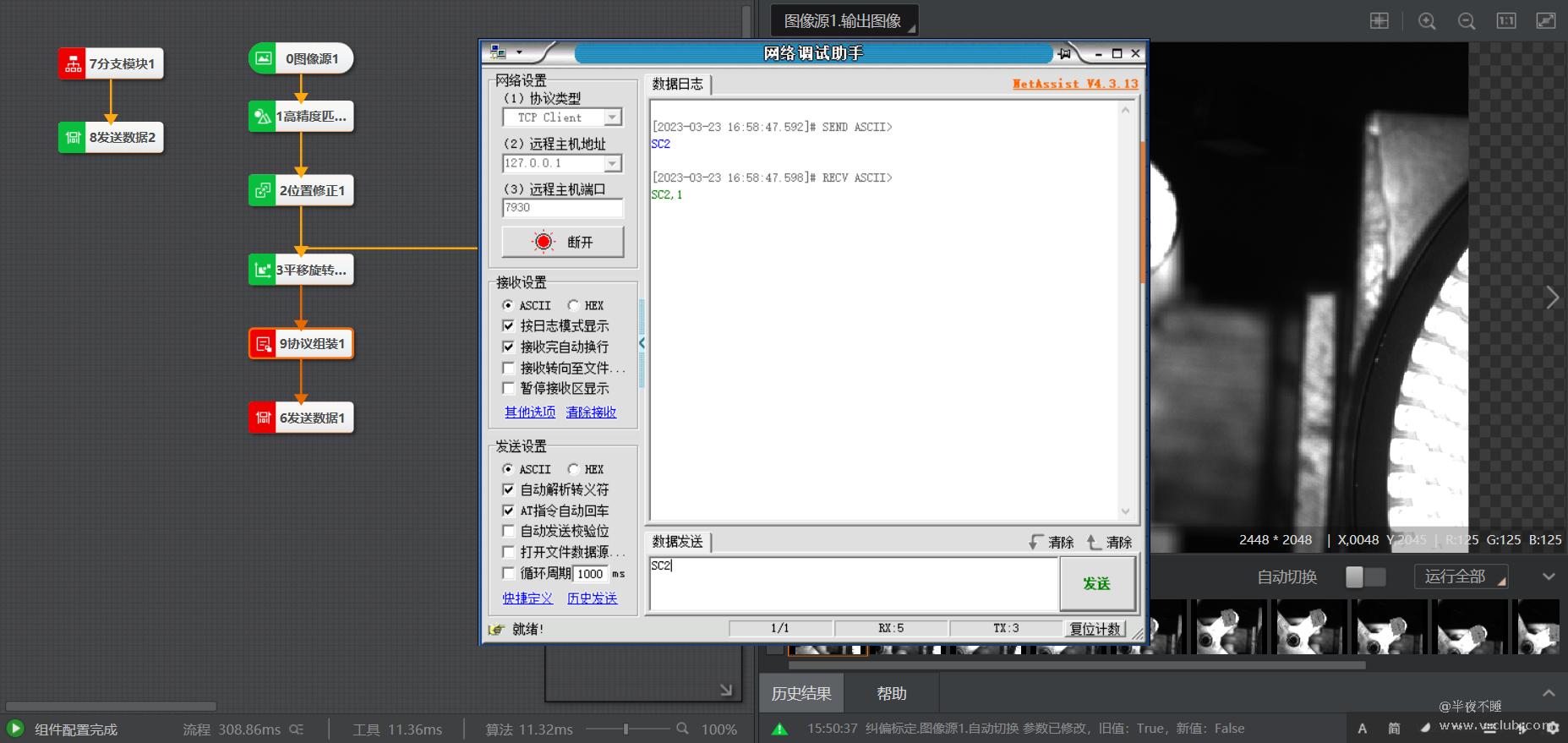
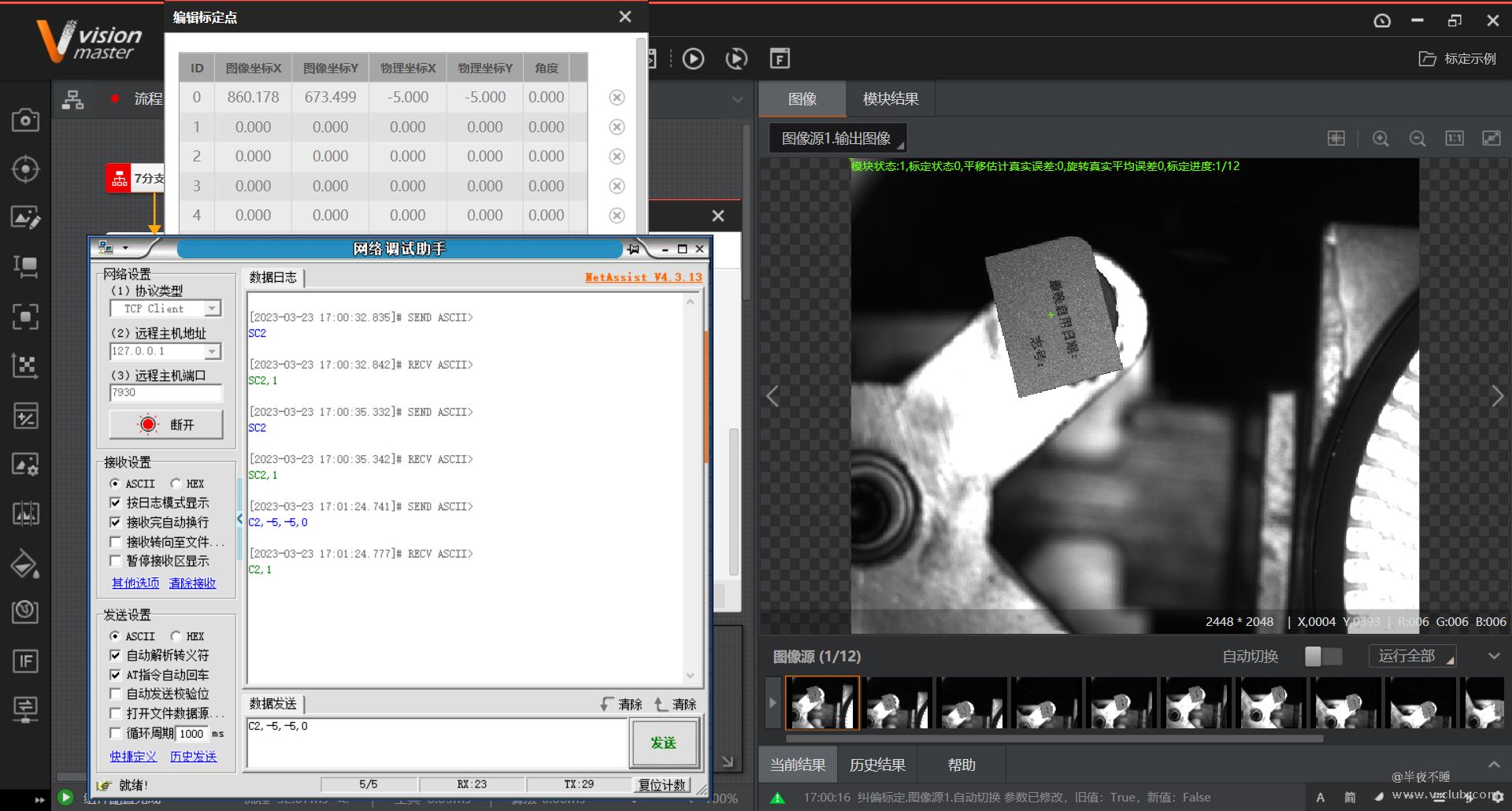
3.演示是用TCP通讯,使用网络调试助手发送机械手所走的实际物理坐标
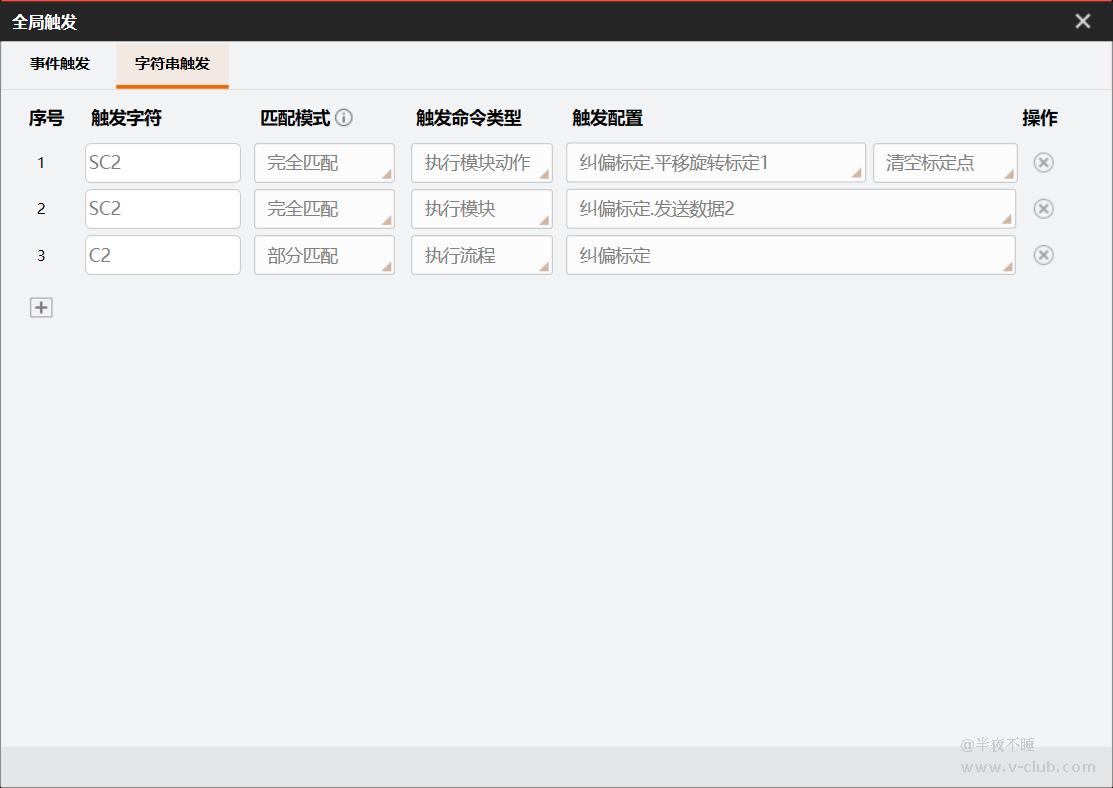
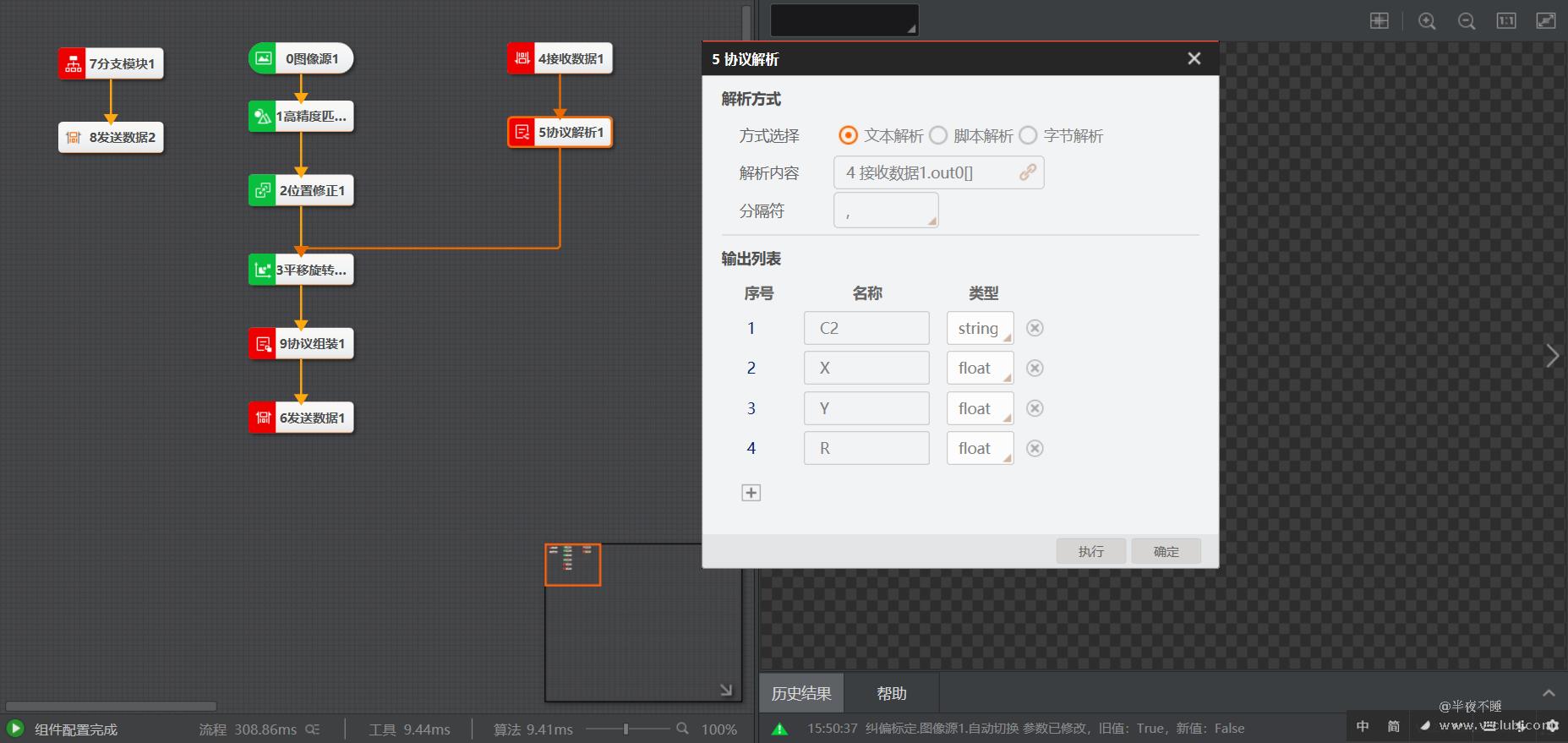
4.通过全局触发来定义不同的字符触发相应的流程,然后协议解析收到的通讯信息需要的物理坐标信息绑定到平移旋转标定模块上,最后通过发送数据模块将对应的标定状态和其他结果通过tcp通讯发送回来。

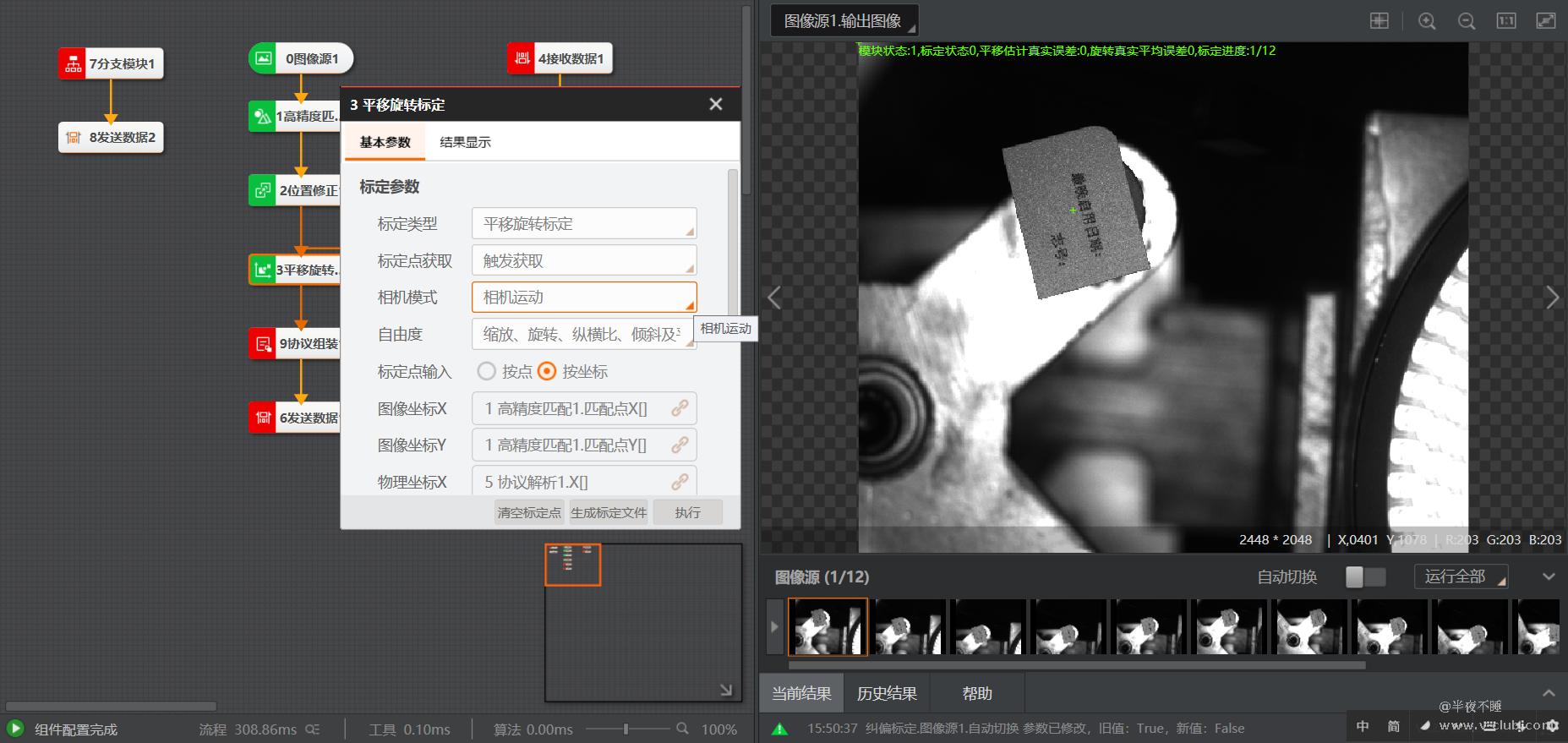
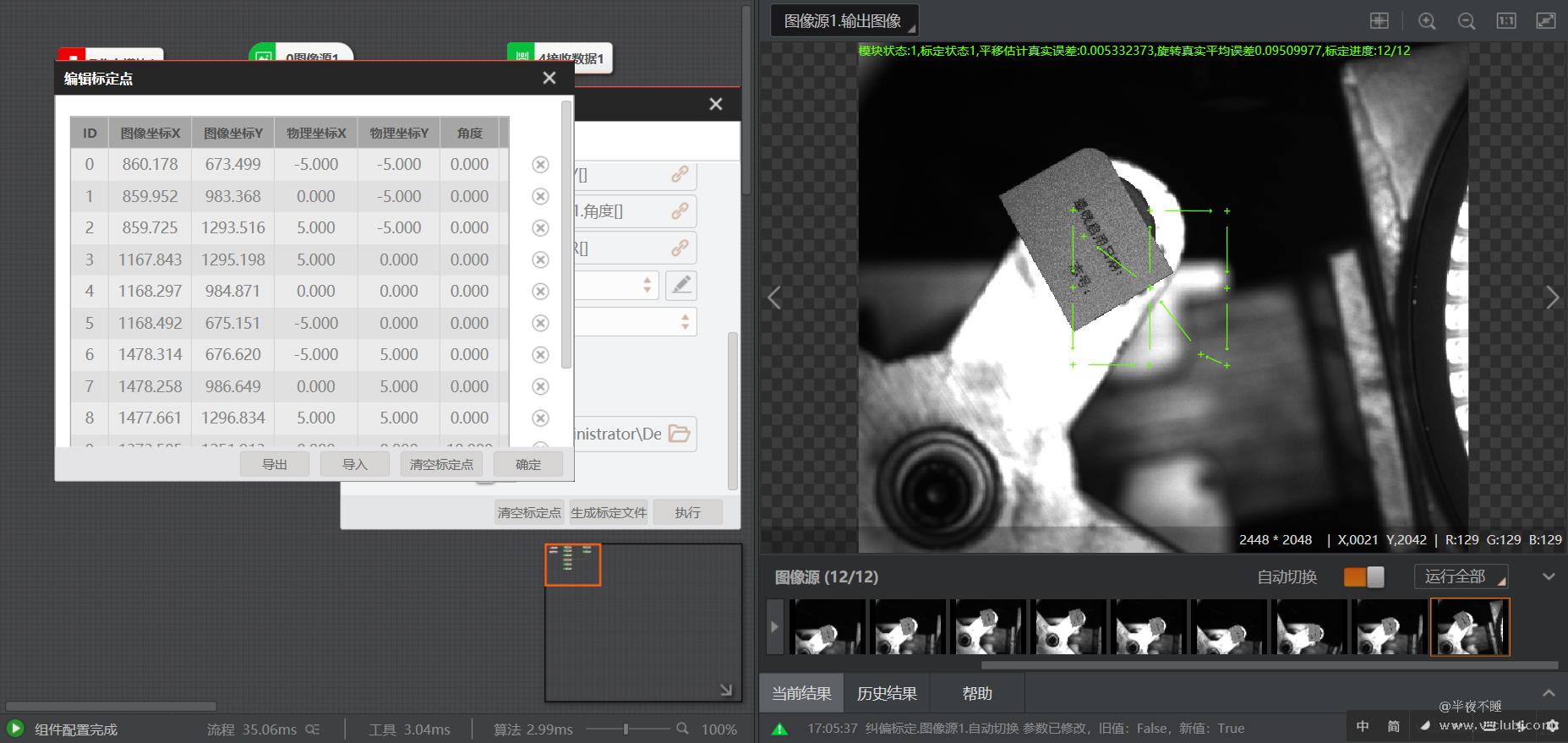
这里要注意下:平移旋转模块标定模式的选择,根据吸嘴与旋转轴是否共轴,可以将定位场景分为共轴与不共轴两大类场景,分别对应平移标定和平移旋转标定。还有相机模式的选择,相机静止和相机运动。
5.走完12点后得出平移选择标定标定结果,然后将标定文件生成保存下来
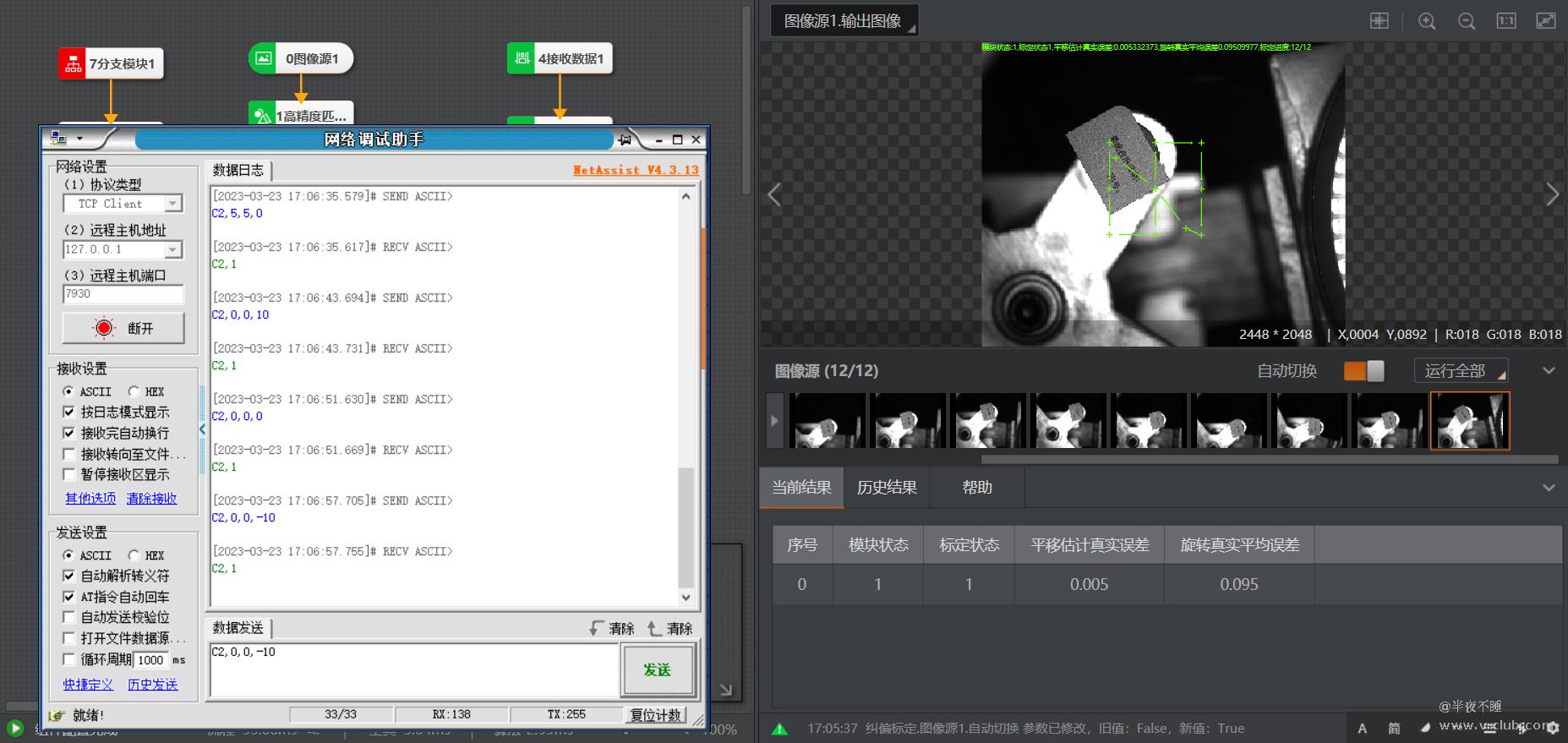
总结:相对于N点标定模块,这次增加的平移旋转模快使用更加便捷方便一下,要求设置的参数相对比较少,整体使用起来是比较不错对于使用者是比较有好的。
最后我也把源文件跟图片上传到附件上需要的可以下载一下(分享不易,所以下载附件需要积分),然后附上我现在用的VM版本信息最好是版本跟我的一样,不然有可能源文件打开有问题。




 浙公网安备 33010802013223号
浙公网安备 33010802013223号