- 1278
- 1
- 分享
- 2022-12-03 17:01
1、 问题来源:当不同车型共用同一个充电桩时,受机器人的长度或宽度不同影响,充电时机器人相对于充电桩的位置也不同。
例如:
(1)潜伏车充电时受车长影响,其后退至充电桩处的距离不同。

(2)叉车由于车宽和车长不同,其充电时运动中心的位置也不一样。

2、充电方案:一个充电处(充电区或无线充电桩)+N个充电关联点(0≤N≤5,取整)
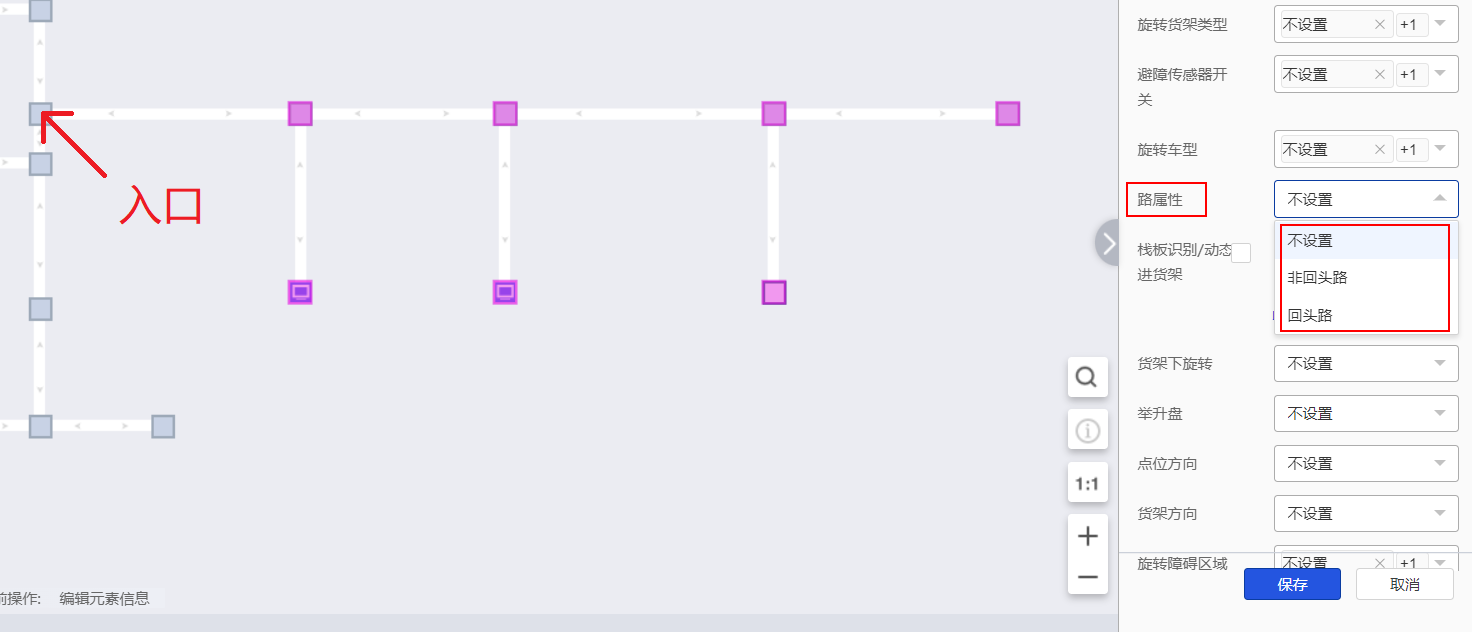
3、绘制拓扑图:
(1)潜伏车常用画法:充电区坐标为真实的充电桩坐标;关联点坐标为潜伏车充电时机器人的坐标。

(2)叉取机器人常用画法:充电区为真实的充电桩坐标;充电关联点为叉车充电刷板与充电桩紧密接触充电时叉车运动中心的坐标。

4、3.1.3版本之后的RCS的配置方法:
步骤1:在rcms网页的“系统参数”>“场景配置”中勾选“外设”选项。
步骤2:在rcms网页的“地图规划”>“地图配置”>“外设编辑”中选择“充电桩”,再点击“+新建外设”。

步骤3:填入外设序号(内容自定义,注意不可重复)。

步骤4:在添加的充电桩中点击“框选”,然后框选充电区。
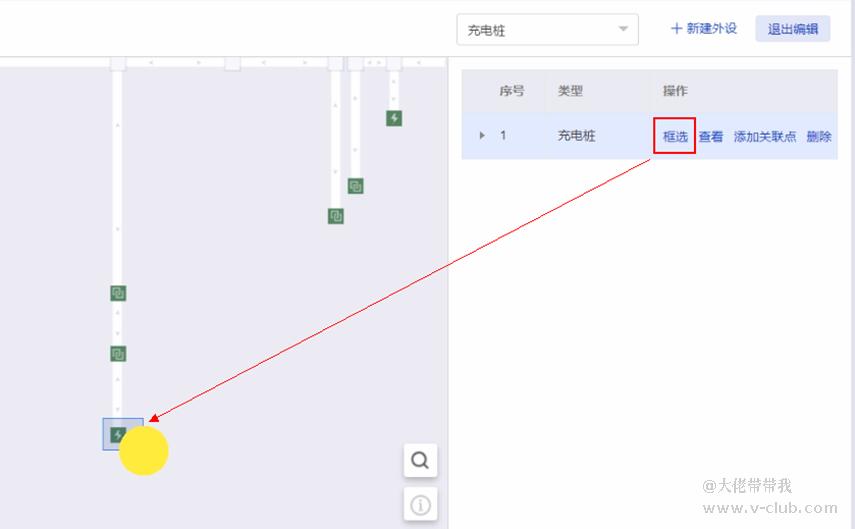
步骤5:在添加的充电桩中点击“添加关联点”,填入序号(这里的序号只支持1~5的整数)。填入序号后点击一下“关联充电桩坐标”再点击一下地图中的充电关联点,即可关联成功。最后,再选择对应的车型,填入充电角度,点击“保存”即可。

步骤6:参考步骤5再添加另一种车型的关联点。
步骤7:配置完成后,远程配置RCS即可生效。

5、3.1.3版本及之前的RCS的配置方法:
修改配置文件rcs_extra_config.xml(路径:hikrobot\HikServer\rcs目录下的rcs_extra_config.xml)
一行对应一种车型,并填入对应的倒车距离。


目前为3.1.4Linux版本RCS系统,按您的讲解配置完后,潜伏式Q7与Q3并未选择其充电桩关联点进行充电,选择了充电桩真实坐标,请问我哪里做的有问题
- 1

 【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30
【使用2D相机+VM实现3D抓放】复合机器人光伏某场景上下料项目2024-05-30 海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13
海康机器人携行业全场景智造方案,亮相上海SNEC光伏展~2024-06-13 VM算法平台-加密狗常见问题排查2024-06-13
VM算法平台-加密狗常见问题排查2024-06-13 纸杯机缺陷检测视觉解决方案2024-05-31
纸杯机缺陷检测视觉解决方案2024-05-31
 浙公网安备 33010802013223号
浙公网安备 33010802013223号