- 3715
- 2
- 分享
- 2022-11-11 10:14
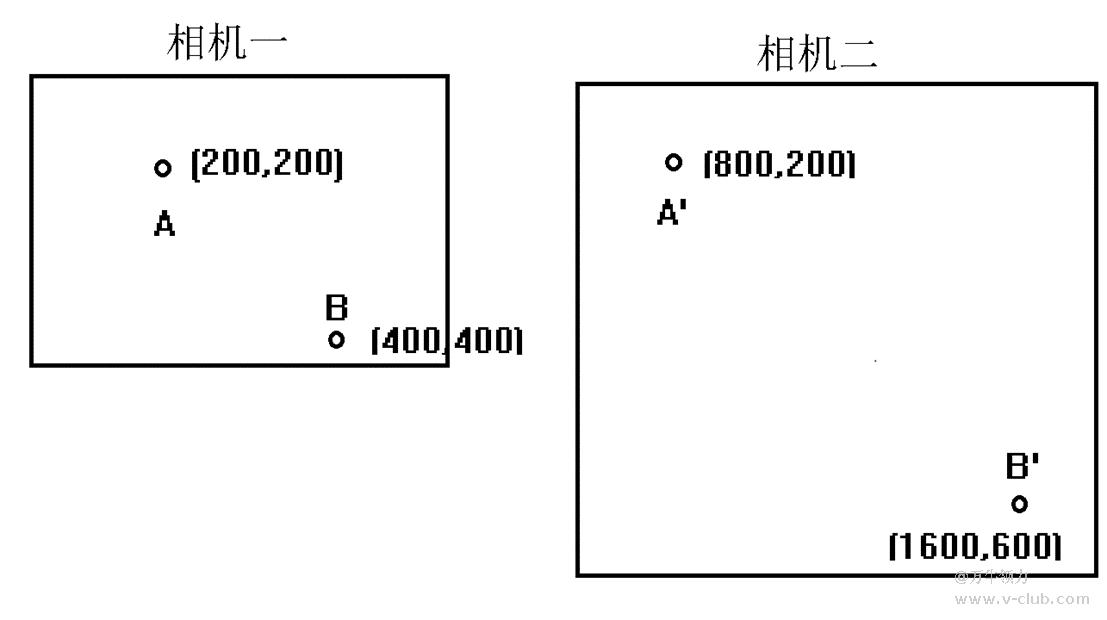
已知相机一拍照得到点A(200,200),B(400,400),与相机二拍照得到点A’(800,200),B’(1200,600),实际映射关系为xy方向*2,并平移(-200,100)。
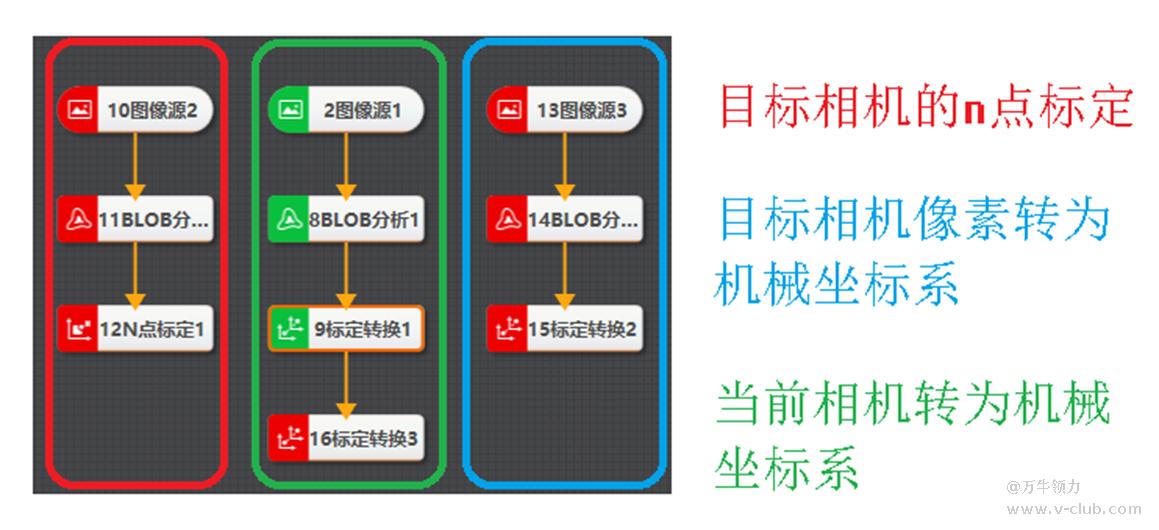
新建立一个流程,添加两个图像源,并绑定两个相机。依据现场情况,添加找圆、找blob工具来获取需要做映射的点,注意两个相机找到的点必须是同一个点,可以是圆心,可以是角的交点,但各自训练的模板建议不要使用(无法对应同样的点)。最后添加一个相机映射,用于获取转换关系。结构如下图所示:
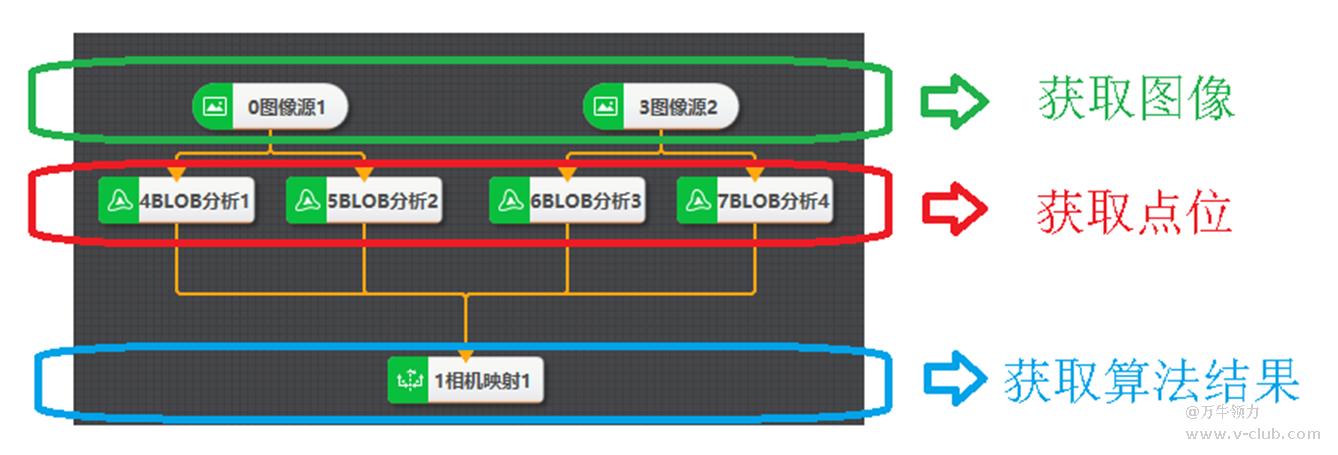
首先,将点位获取工具参数设置OK,并确定有输出结果。建议使用特征点圆心来做映射因为圆的特性,所以使用blob的质心也同样没有问题。将四个位置都配置好后,将数据输入最终的相机映射工具。

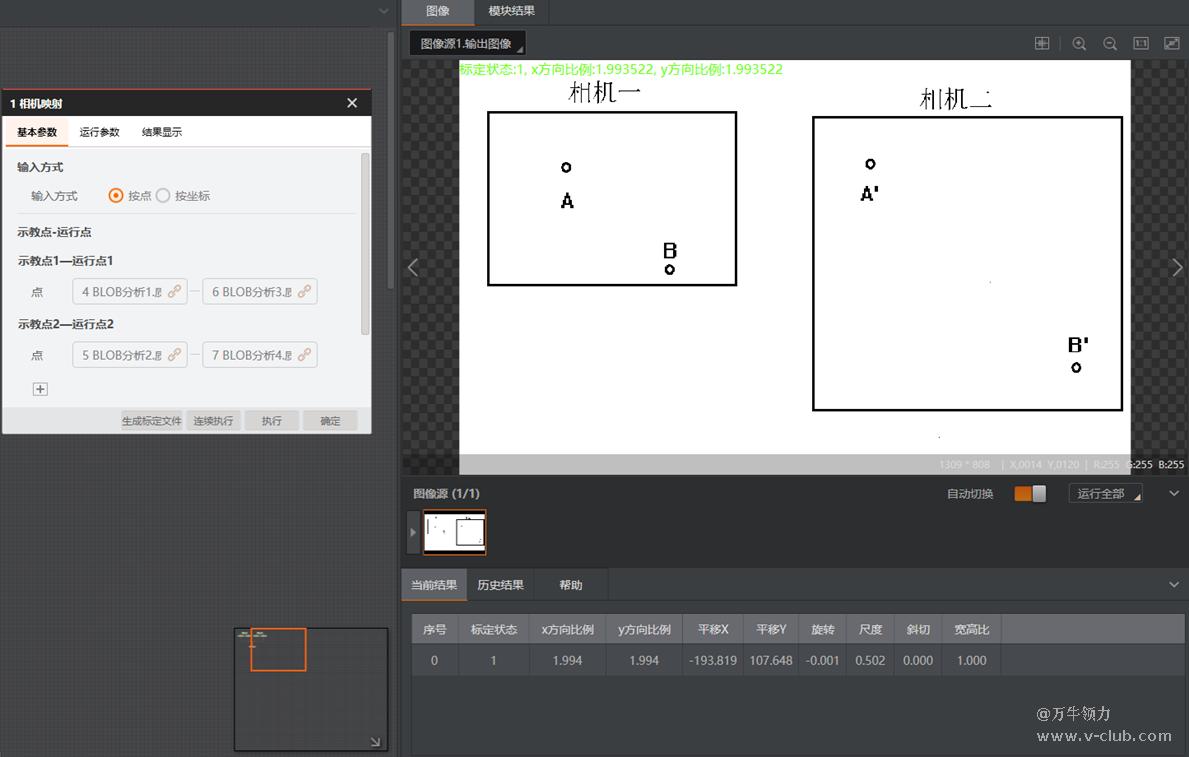
其中示教点就是当前坐标系的点,运行点为目标坐标系的点。我们的目标是将相机一的坐标转为相机二坐标,就是将相机一获取的点填到左边,相机二获取的点填到右边,保持一一对应,全部填写完后,点击执行,待运算结束,点击生成标定文件,保存在本地命名为”映射.iwcal”。
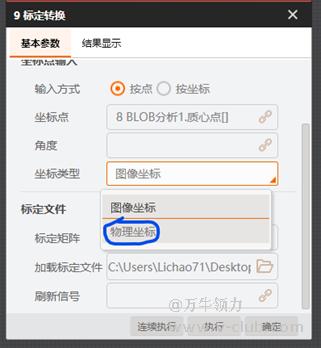
最后就是使用,添加标定转换工具,在里面加载标定文件”映射.iwcal”,并将坐标绑定后,运行标定转换,该工具输出的结果就已经是目标坐标系的点了。

注意事项:确认转换对象,正常转换都为将可以标定的相机作为目标,不可标定的相机作为当前相机。
注意事项:标定转换中可以选择物理坐标,此时为映射的逆运算。
注意事项:当前坐标转为目标坐标后,可以直接使用目标相机的n点标定。



- 1

 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号