- 1449
- 0
- 分享
- 2022-10-08 15:22
1. VSLAM简介
VSLAM的原理很简单,通过采集下视相机的图像,借助算法处理下视图像,识别地面特征构建成视觉地图,该地图后续进一步可用于AGV的定位与导航。当AGV进行定位时,根据构建的地图和当前的下视图像,通过定位算法,实现当前图像与地图的匹配,从而计算AGV的位姿,完成导航任务。
2. 运行和维护要求
VSLAM导航的关键因素之一是地面特征,因此从地面特征的显著性和稳定性两个方面对运行场景存在限制:
1)地面存在丰富的纹理特征
2)长时间运行下,路径上160mm*160mm范围内的磨损和污染面积占比不超过10%
3)运行路径上无水渍干扰:地面存在水渍后,从下镜头看,灰度会存在较大的变化,会导致地面特征变化
VSLAM导航对维护存在以下要求:
1)地面发生变化时,需要对相应的路段进行重新采图。这种情况一般存在现场有其他车辆和AGV运行路线重叠,对地面进行长期磨损或破坏后修补;
2)地面有污染后,需要对地面进行清扫。工厂内有较大油污或粉尘的覆盖引起地面的变化;
3. 场景示例
1)常见适用场景大多可以通过观察能看到较多的点状或者斑点状的形状在表面,并且和地面背景有较大的颜色差异,这些点状和斑点状可以构成定位中的特征来进行识别。典型的场景有水泥地面、地砖地面、金刚砂地面等。

瓷砖地面
2)对于一些弱纹理地面,其地面的点状或者斑点状或者其它形状的图案很少或者很稀疏,地面大部分为单一的某种颜色。由于弱纹理地面能稳定识别的特征较少,会影响定位的稳定性。
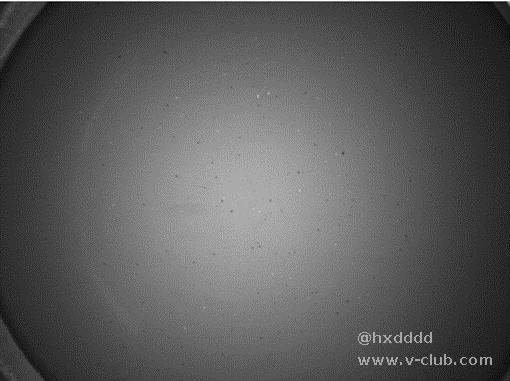
环氧地面
4. 整体评估流程
评估的整体流程如下图所示:
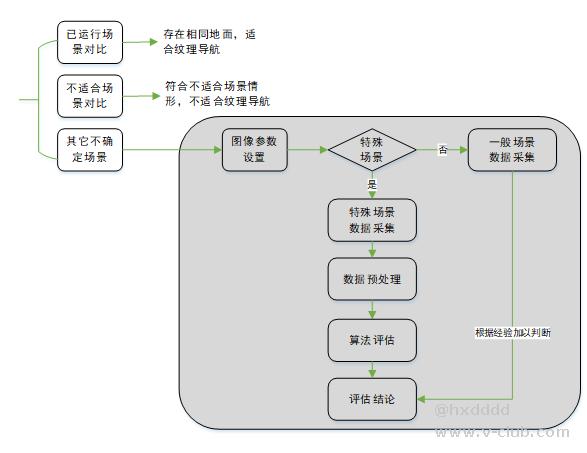
评估整体流程
首先对地面环境进行判断,如果地面和一些常用适用场景的地面类似(具体见第3节内容),则根据经验即可认为适合纹理导航,如果符合不适合的场景,则不应该使用纹理导航。对于其他一些不确定的场景,如地面环境的存在干湿变化,或下视相机的对地高度不断变化的场景,则需要配合具体的VSLAM前端算法进行更加细致的算法测试。
对不确定场景的评估需要遵循如下步骤:
1)特殊场景判断:运行路径地面存在干湿变化,认为是特殊场景;其它为一般场景;
2)设置图像参数:设置图像曝光、增益和占空比参数;保证最终呈现的图像质曝光正常;
3)采集数据:通过相机录制功能对下视地面进行视频录制,用于后续的离线处理;
4)数据处理:一般场景下,直接根据历史常规经验即可加以判断,特殊场景下需要采集数据,并对数据需要进行预处理,将处理后的数据转成可以解析的图像格式,并构建合适的数据集目录;数据处理完成后,进一步分析图像中特征获取的质量,以及评估图像匹配过程的精确性和正确性;
5)给出评估结论:根据接收的数据和算法离线测试,配合现场的工作环境和运行状态,综合确认是否适合纹理导航;
通过以上的介绍,大家应该对纹理导航的项目环境要求有了大体认知,也能更加准确的在适合的场景中应用恰当的技术来提高效率。感兴趣的小伙伴可以在周围环境中评估一个合适场景进行VSLAM导航,感受一下下视纹理导航的使用效果吧。

 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03
 浙公网安备 33010802013223号
浙公网安备 33010802013223号