- 1400
- 1
- 分享
- 2022-10-08 15:21
激光导航的AMR行走各种场景中,难免因为各种原因的影响出现走偏的现象,那么我们如何快速定位出AMR的确是走偏了,还是因为人为因素将AMR推着偏离了拓扑线呢。其实很简单,首先确定走偏的定义:激光轮廓和地图轮廓不一致。

Figure 1 走偏场景罗列
走偏原因千千万,但是万变不离其宗,抓住最本质的因素,即可快速定位出问题,进而从而的解决现场问题。
1. 上线
人眼看到的一个3维空间,2D激光点是在一个平面上,可以理解为二维空间。那什么原因会导致人在空间迷失了自己呢。
- 千米长走廊,走廊完全对称,一眼望不到边,身处其中的你是不是完全迷失了自己,根本无法知道自己到底相对于走廊处于哪个具体位置,也不知道谁是头谁是尾,这个在2D激光中就认为被绑架了。怎么解决呢?有人告诉你在走廊中具体的位姿是不是就可以走起来了,也能够知道自己具体要往哪边走,对于AMR也是如此。给定准确的初始位姿上线可以解决AMR起点未知的情况,这种方案暂且命名为扫码上线。
- 行走在杭州这个陌生的城市中,只知道前后左右,怎么告诉出租车司机具体在哪里呢,如果实际在西湖区上,结果旁边的人说你在萧山区,实际位置和描述位置相差十万八千里,司机怎么也找不到你,但是有人如果告诉你在西湖区西湖边,然后你根据自己相对西湖的位置就很容易描述自己的位置了,这个对于AMR也一样,从未知到已知位置,需要制定一个大概位置,然后根据所处地图进行搜索,这种方案为搜索上线。但是该方案可能会存在一定问题,如果周围环境很类似,我们可能会搜索错误,称为误上线。
2. 行走
AMR走着走着就偏离了拓扑路线,一般什么时候会发生这种情况呢。激光类似人眼,只不过是二维平面。如果你从行走到一个记忆中的地方,但是这个地方的环境大部分都改变了,该怎么走,该怎么通过这个地方呢。那么首先想到的办法肯定是寻找记忆中重合的地方,哪些有明显特征的路标,例如百货大厦,钟鼓楼等,然后根据路标的指引试着走出这块区域,对于AMR也是一样。
激光能够测量的距离大约为40m,希望能够在10m范围内观测到稳定的路标,从而保证通过性。如图,现场十分的空旷,并且经常性的乱堆货物,导致环境变动频繁,那么这个时候AMR在行走过程中就容易走偏了。
路标指的是不变的并且能够明显区别于周围环境的物体,例如反光条,柱子,墙体等。反光条通过强度信息能够和周围物体形成鲜明对比。柱子呢,轮廓较少,激光无法准确的识别。但是我们可以通过先验校验,设置轮廓稳定区,将柱子设置为路标信息。通过这些特征拟合,路标指引的方法,就能够在AMR行走过程中增加位姿的指引,进而确定AMR通过。
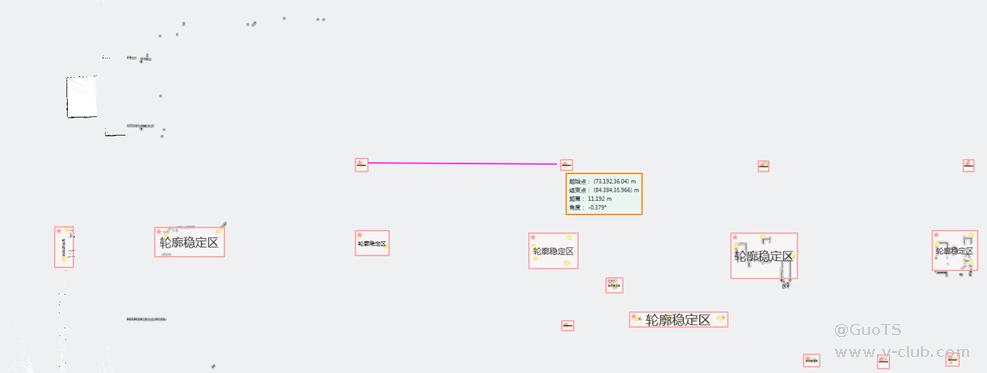
Figure 2 地图路标信息

- 1

 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26- 【2.5D】2.5D定位引导最强攻略-高精度版2024-08-26
 某项目呼叫器异常通讯拦截2024-08-20
某项目呼叫器异常通讯拦截2024-08-20- 某项目呼叫器异常通讯拦截2024-08-20
 【嵌入式开发】嵌入式算子开发2024-08-24
【嵌入式开发】嵌入式算子开发2024-08-24
 浙公网安备 33010802013223号
浙公网安备 33010802013223号