- 2563
- 1
- 分享
- 2022-08-10 10:02
如果物料比较大时,我们需要拍物料比较远的两点,来更精准的求出物料的角度偏移值。
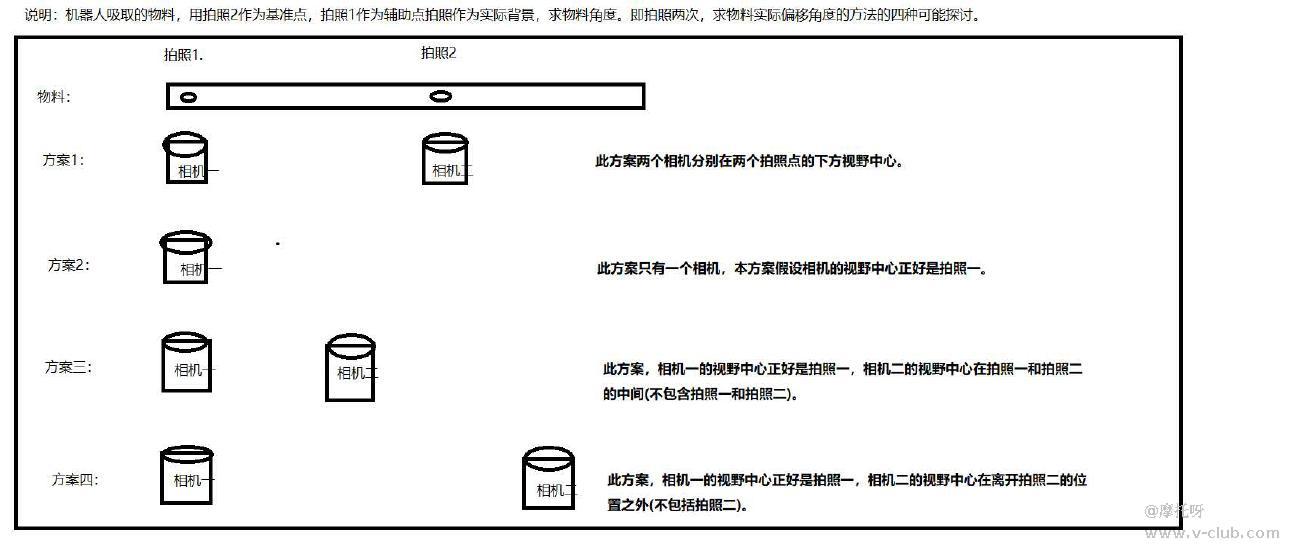
方案一的方法:
a. 将拍照—特征点平移到相机一的视野中心,记下当前机器人的点位P1。平移机器人X,Y,将拍照一特征点平移到相机二的视野中心,记下当前机器人的点位P2。其实根据题干,我们可以得到P1就是我们的唯一拍照点。
b. 在P1点分别当做拍照一和拍照二的九点标定。P1点在九点标定的第四点。
c. p1减去p2可以得到拍照二到拍照—的向量值P21,并把向量值的角度作为基准角度R。
d. 如果机器人吸取下—个物料。根据相机一和相机二的九点标定文件可以分别得到拍照—和拍照二的向量偏移值X1,X2。
e. 拍照二的目前机器人的实际值应该是P2+X2=P22。 拍照一的目前机器人的实际值应该是P1+X1=P11。
f. P11减去P22可以得到拍照二到拍照—的向量值P2211,并把向量值的角度作为基准角度R1。
g. R1减去R等于R2,就得到实际物料相对于基准点,当前的角度偏移值。。
方案二的方法:
a. 将拍照—特征点平移到相机—的视野中心,记下当前机器人的点位P1。平移机器人X,Y,将拍照二特征点平移到相机一的视野中心,记下当前机器人的点位P2。
b. 分别将P1,P2分别当做拍照一和拍照二的基准点。根据其中—个基准点做相机—的九点标定,基准点在九点标定的第四点。
c. p1减去p2可以得到拍照二到拍照—的向量值P21,并把向量值的角度作为基准角度R。
d. 如果机器人吸取下—个物料。根据相机一和相机二的九点标定文件可以分别得到拍照—和拍照二的向量偏移值X1,X2。
e. 拍照二的目前机器人的实际值应该是P2+X2=P22。 拍照一的目前机器人的实际值应该是P1+X1=P11。
f. P11减去P22可以得到拍照二到拍照—的向量值P2211,并把向量值的角度作为基准角度R1。
g. R1减去R等于R2,就得到实际物料相对于基准点,当前的角度偏移值。

- 1


 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号