- 1913
- 0
- 分享
- 2022-03-26 10:39
一、什么是激光散斑
激光散斑(speckle)通常指激光器通过一系列光学透镜调制后照射在DOE上经过衍射形成随机分布的散斑图案,是一种空间编码结构光。根据激光原理不同,目前可分为LD激光器和VCSEL激光器,LD激光器的散斑图如图所示。

激光散斑作为一种特定的主动纹理,以其高对比度、稠密纹理、唯一性好等特点被广泛应用在3D视觉技术中,结合不同的视觉系统可得到不同的深度相机,其中结合单目相机和结合多目视觉方案原理上相差较大,结合单目视觉的方案在成本上可节约1个相机,但是需要提前对散斑图的特征与相机之间的关系进行标定,受干扰光影响严重,在多相机拼接过程中容易出现互相干扰;结合多目视觉的方案在使用上更为灵活,散斑在整个系统中提供主动纹理,根据多目匹配方案进行深度图计算
二、双目视觉为什么要使用散斑
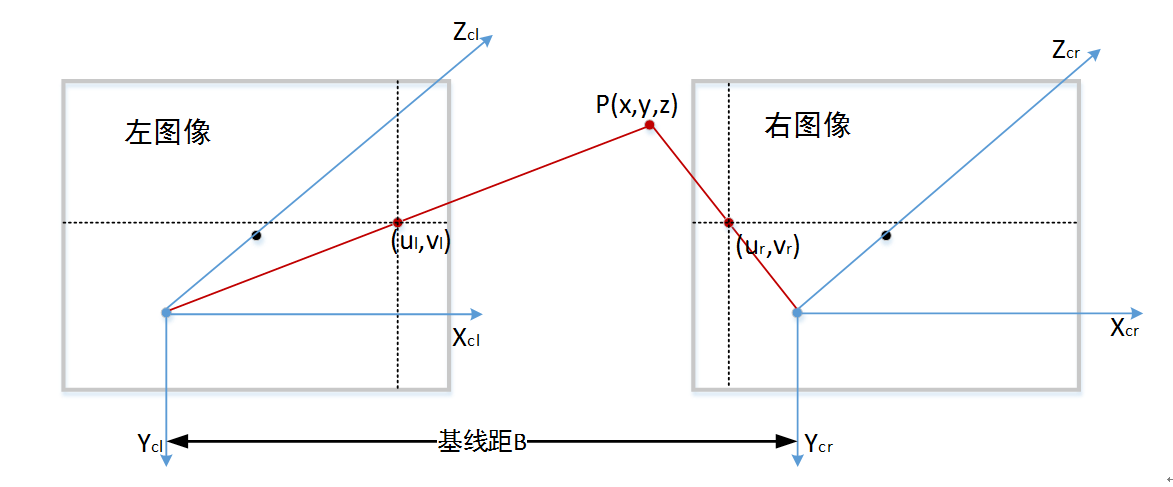
在目前的3D传感器中,双目立体视觉是比较常见的结构。在传统的双目立体视觉中,核心问题是如何从匹配图像中找到对应于参考图像的对应点,立体匹配算法通常有以下几个步骤: a.像素点特征提取;b.匹配代价计算;c.代价聚合;d.视差计算;e.视差精细化。然而,本文所讲的散斑技术应用在双目立体系统中,与单纯的双目立体视觉有些不同,双目散斑立体视觉系统由两个相机外加一个随机散斑投射器组成,是为了解决现在立体匹配算法无法解决的几种问题。
1、无纹理

2、重复图案

在以上两种情况可以通过添加投射图案的方式来解决。因为这些场景会导致在立体匹配过程中无法唯一确定哪一个是正确的匹配点,而通过投射具有全场唯一性的图案来给立体匹配增加健壮的匹配纹理,将会大大提高立体匹配的精度,同时具有极强的抗干扰能力,尤其是在环境复杂的开发场景,对干扰光、材质影响等问题都表现出了较好的鲁棒性,使其成为一种优异的测量方案。
三、散斑双目的优劣势
优点:
1)方案成熟,相机基线可以做的比较小,方便小型化。
2)单帧 IR 图就可计算出深度图,帧率高。
3)激光散斑装置比较成熟,寿命长且功率低。
4)主动光源与物体本身纹理互补,全天候都可以使用。
5)相机的基线距、散斑密度、散斑图数目等可以系列化,方便对不同的应用场景制定合适的方案,同事兼顾帧率与精度。
缺点:
1)容易受环境光干扰,室外体验差。
2)散斑遇到吸光或反光的材质,成像效果不佳。
3)随检测距离增加,精度会变差。
4)测量范围是双目的共同视野,基线较大时近距离测量比较受限。
四、多DOE和单DOE
在3D视觉结构光方案中,光学衍射元件(DOE)是用来完成将激光束的调制,使其具备特征结构,生成特定的光学图案(如激光散斑等)实现深度信息的测量。
一定的测量范围中,一个DOE即可满足场景对纹理信息的需求。在测量范围较大或者精度要求较高的场景,可以使用带多个DOE的相机轮流单独照射环境,既可以使用多帧深度图融合得到更稳定的结果,又可以使用多帧特征图提高视差亚像素精度。DOE设置越多,像素特征越丰富,深度图鲁棒性越高,精度越高,但同时成本将会上升,深度图生成的帧率也会下降,需要根据实际应用进行方案设计。


 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 双车联动调试案例-华工中试基地2024-04-28
双车联动调试案例-华工中试基地2024-04-28- VM虚拟机部署欧拉系统及磁盘扩容2024-04-25
 浙公网安备 33010802013223号
浙公网安备 33010802013223号