- 5624
- 0
- 分享
- 2022-02-17 15:46
一>棋盘格的作用
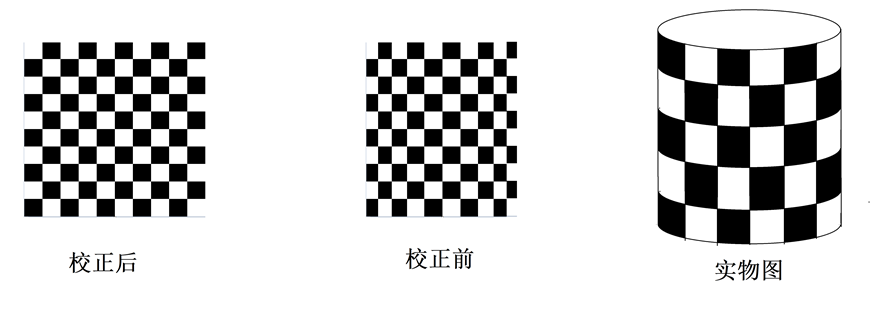
a>畸变校正
径向畸变,径向畸变就是沿着透镜半径方向分布的畸变,产生原因是光线在原理透镜中心的地方比靠近中心的地方更加弯曲,这种畸变在短焦镜头中表现更加明显,径 向畸变主要包括桶形畸变和枕形畸变两种。以下分别是枕形和桶形畸变示意图:
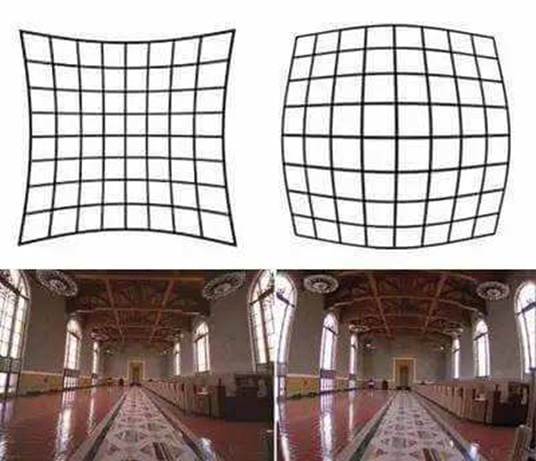
切向畸变,是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的。
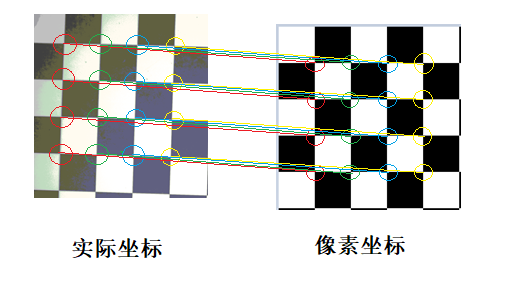
b>图像与实际尺寸转换
图像中的坐标都为像素坐标与实际坐标系的方向和尺寸都不相同。为了将像素转为实际尺寸,那么就需要标定。也可以说是枚举一些特别的点,这些点在图像与实际中 一一对应,求取点和点之间的像素距离,以及实际的xy轴与图像xy轴的夹角。如果这些点是由机器人,或者伺服机构提供,那么就变成了N点标定。这里这些点由棋盘格的黑白交点提供。
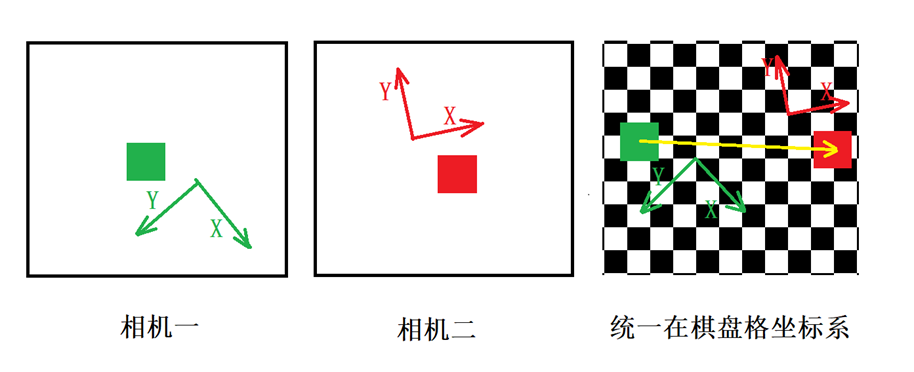
c>转换中介
不同相机的有各自的坐标系,使用棋盘格作为中介将不同坐标系连接在一起。
例如:图像坐标系Image(x,y)经过棋盘格转换矩阵Tc转为棋盘格坐标系,再经过九点标定转换矩阵Tm可以变成机械坐标系Mach(x,y)。
如果两个不同相机使用同一姿态的棋盘格做标定
Image1(x,y)Tc1Tm1=Mach1(x,y)
Image2(x,y)Tc2Tm2=Mach2(x,y)
结论A:那么Mach2(x,y)Tm2逆与Mach1(x,y)Tm1逆在同一个坐标系下
当相机2标定位置与标定位置不同时
结论B:Imag1(x,y)Tc1与Image2(x,y)Tc2+拍照平移距离Tm2逆(或Imag1(x,y)Tc1Tm1与Image2(x,y)Tc2Tm1+拍照平移距离)在同一坐标系下,此类方法可以应用于高精度尺寸检测
结论C:Imag1(x,y)Tc1Tm1与Image2(x,y)Tc2Tm1在同一坐标系下,此类方法可以应用于对位贴合
二>棋盘格规格性能
a>单元格尺寸:黑白格(圆点)距离最近的黑白格(圆点)中心距离
b>单元格精度:单元格尺寸的实际测量值误差精度
c>棋盘格材质:绘制单元格的载体材料:亚格力、金属、玻璃等
d>特征:二维码、DataMartrix等点坐标信息,基准、标识等原点信息
e>打印高度:针对于亚格力、玻璃等材质棋盘格实际绘制位置距离表面的高度
三>棋盘格的选择
a>确定棋盘格黑白格大小
棋盘格棋盘格标定时,视野中黑白格交点需要保证在20个以上,视野中像素数量至少64*64,且每个格子面积要保证25个像素以上,要保证视野中有5*4个黑白格。所以黑白格的大小选型为
像素精度✖5<黑白格边长<视野长边➗6
b>确定棋盘格黑白格精度
正常情况下,棋盘格精度需要小于相机的重复精度,否则就造成了像素浪费。例如单个像素精度为10um时,重复精度约为1/3像素,那么选择的棋盘格精度约为2um
c>确定棋盘格的尺寸
单个相机标定时,只要要棋盘格大于使用区域即可。例如视野为5m*4m,但被拍照的物料大小和移动范围合起来只有2m*3m,那么只要选择比2m*3m的尺寸大一些的棋盘格即可。
联立标定时,棋盘格应该等于联立标定时的视野, 例如测量一个1米长的绳子总长,绳子位置变动为±10mm,理论来说,棋盘格大小只要超过1m+10mm*2即可,但是实际建议选择更大一些尽力棋盘格能充斥整个视野。 例如相机视野时40mm*16mm,那么棋盘格大小要超过1m+40mm
d>确定棋盘格的材质
高精度的偏向于玻璃和金属类
普通精度偏向于亚格力、菲林片、纸


 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
【3D系列】我们用2D相机实现3D无序抓取了2024-10-21- 【3D系列】我们用2D相机实现3D无序抓取了2024-10-21
 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14- 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号