- 4446
- 3
- 分享
- 2022-01-10 19:55
第一步:相机接线

第二步:相机连接及 IP 地址配置
1.打开读码客户端软件IDMVS。.jpg)
下载地址:https://www.hikrobotics.com/cn/machinevision/service/download?module=0
2、设置IP地址。左键单击相机,可在下方看到相机IP地址,将对应的网卡配置同网段或都为自动获取即可。
如需修改IP,右键相机,选择修改IP即可修改相机IP地址(相机与本地网卡需同网段)。


第三步:图像和读码设置
1、
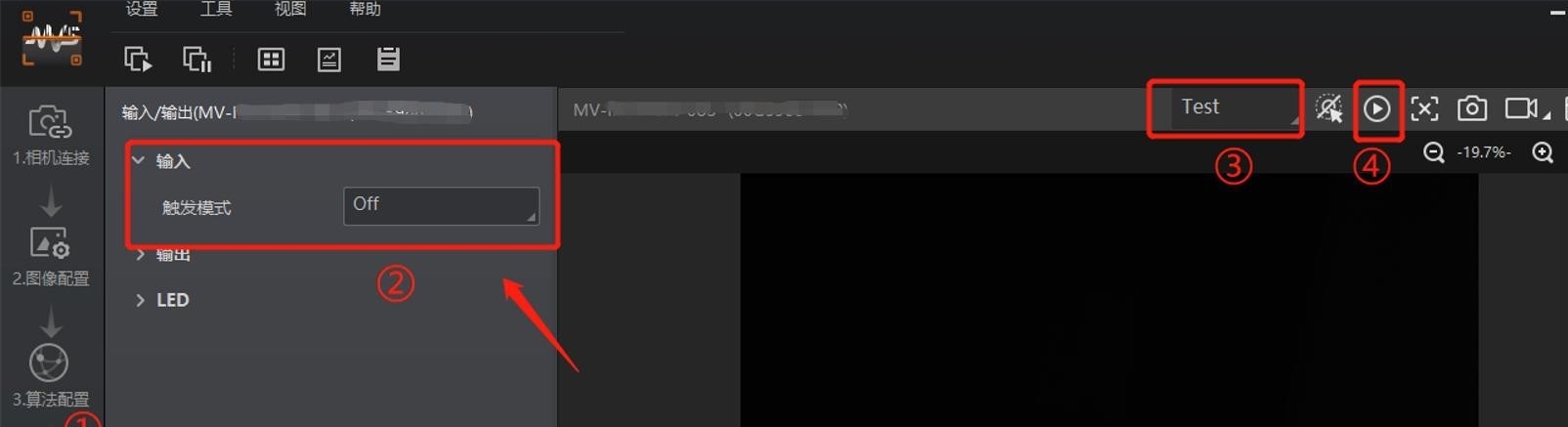
关闭触发模式,预览图像。找到输入输出
,触发模式选择到Off。
2、 通过“预览窗口”区域右上角下拉选择设备的运行模式,运行模式分为 Test、Normal,Raw 共3种。


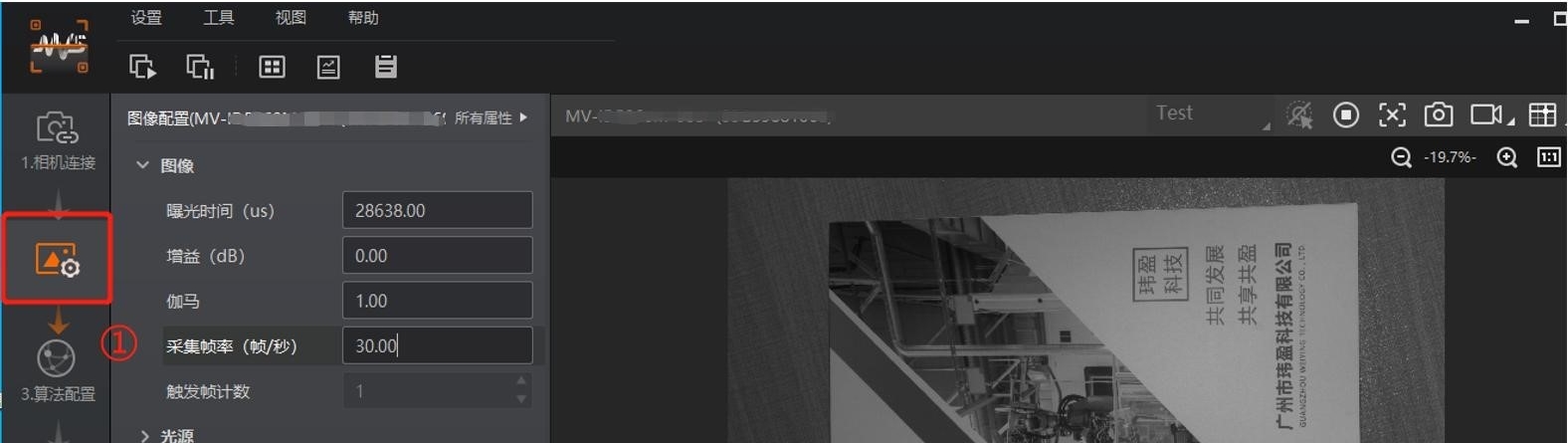
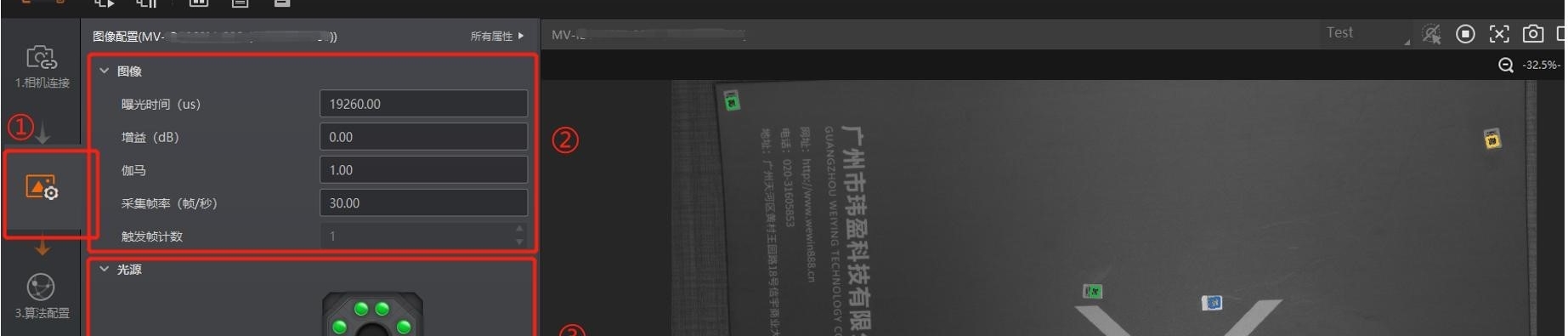
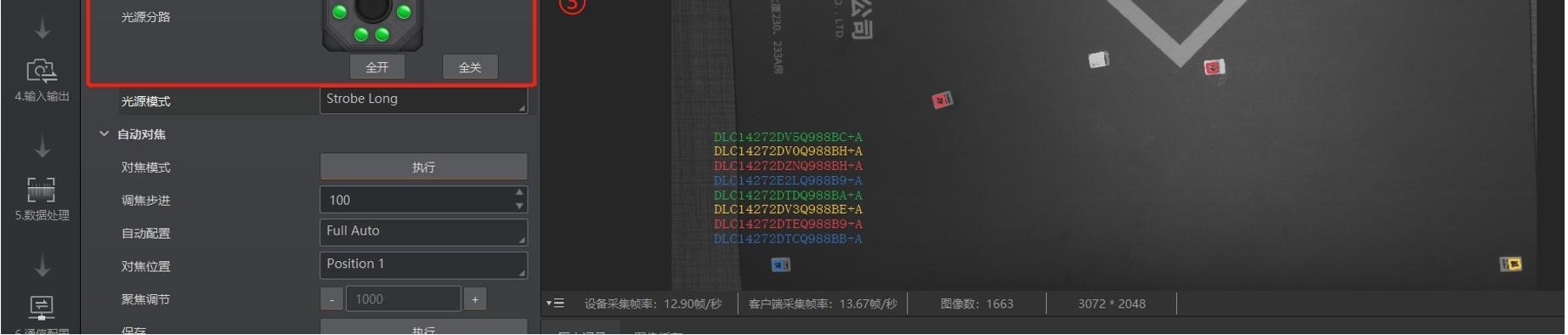
3、 设置合适的视野。点击图像设置,调整合适的视野,点击自动对焦或者手动对焦,使得图片最清晰。

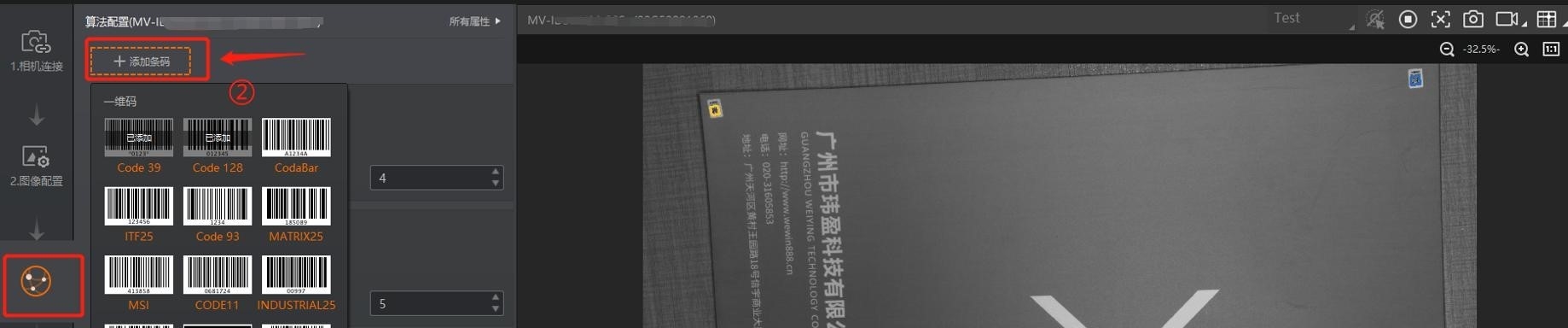
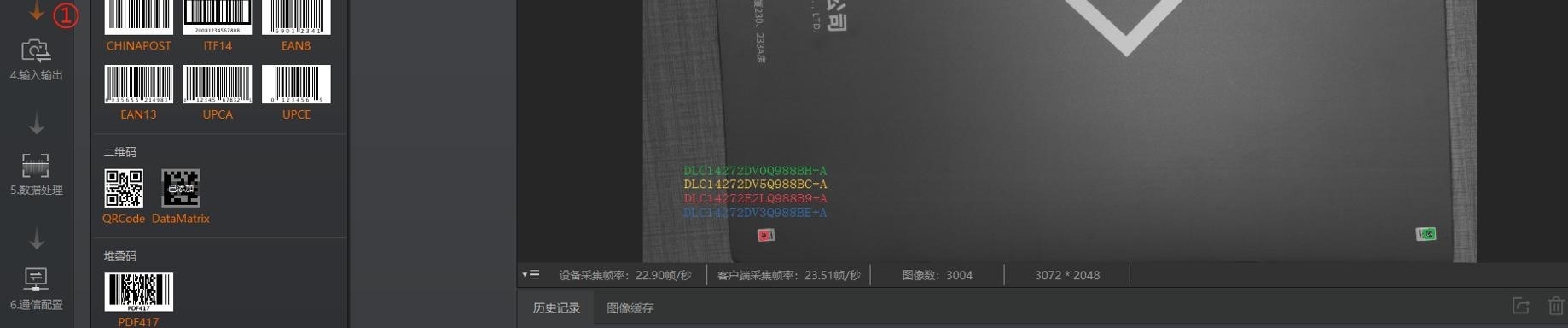
4、 添加条码类型。点击算法配置,添加码类。选择设备需要读取条码的码制,可多选。选择的码制越多,算法处理每张图片的耗时将增加,建议根据实际需求选择对应的码制,确保达到最佳效果。
5.若识别效果不佳, 点击图像设置,调整曝光时间、增益、伽马以及光源参数。
第四步:结果输出。
1、相机读码结果的输出输入。打开触发模式,选择触发源,对应传感器触发信号线。输出端口信号的选择有1.2.3,共3根信号线,可以选择不同的对应事件。这里设置为读不到码就从“LineOut1”输出信号。你也可
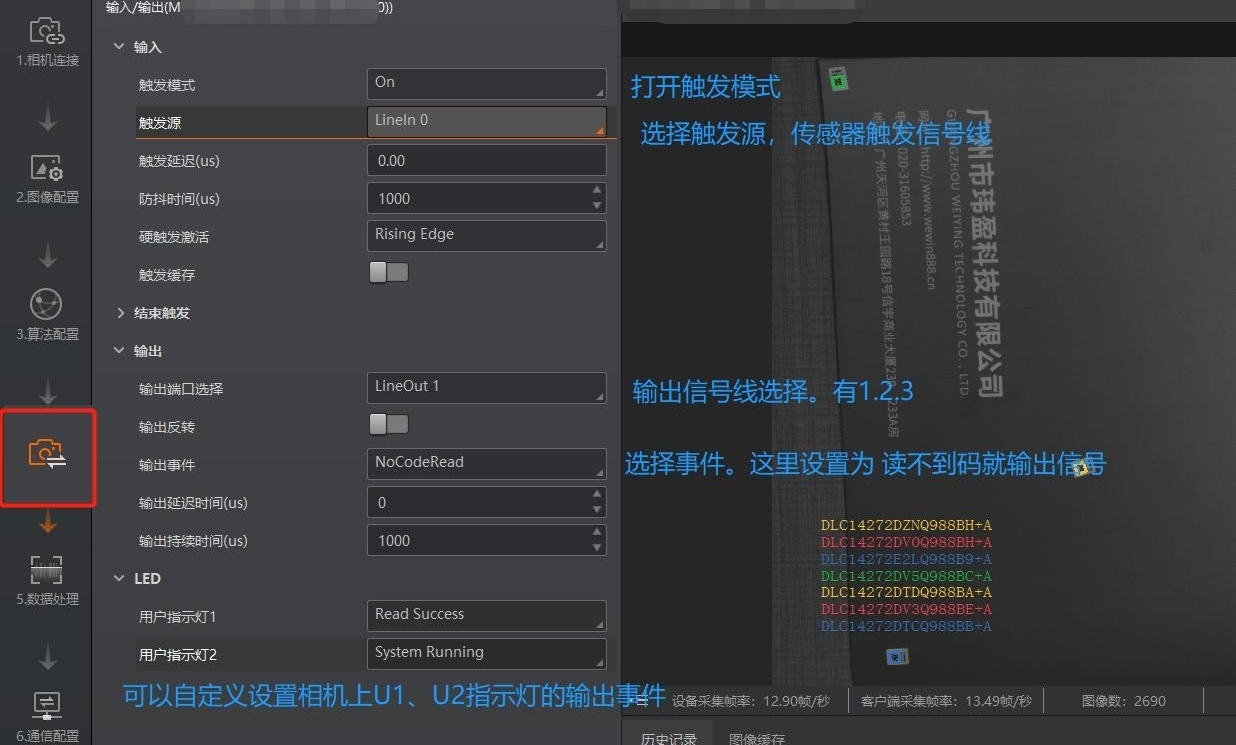
以自定义设置相机U1,U2指示灯的输出事件。 2、读码结果通信保存。下载通讯助手,协议类型选择TCP。设置客户端,服务端,相机的IP地址与软件通讯助手保持一致。
TCP通讯助手下载:https://cloud.189.cn/web/share?code=3uAZj2RNrEJv

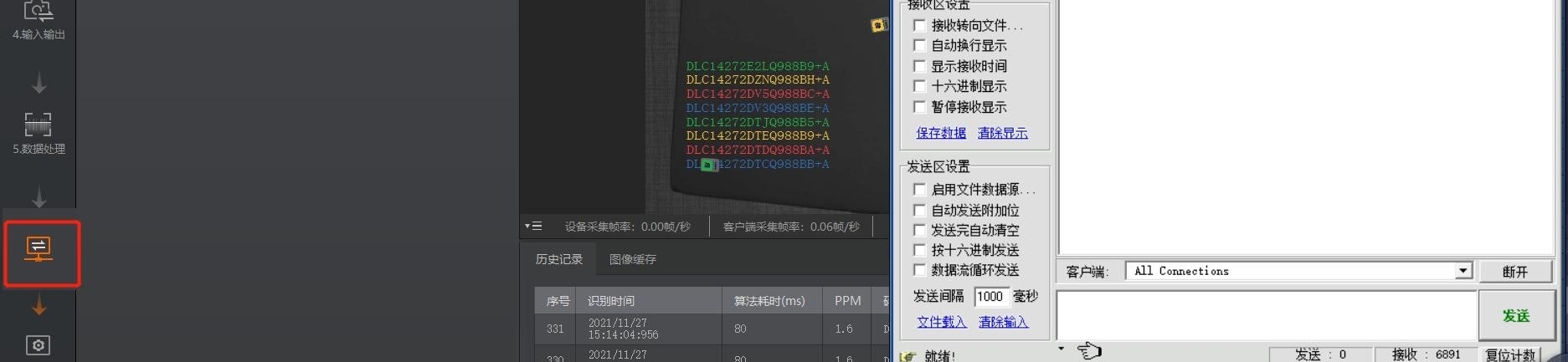
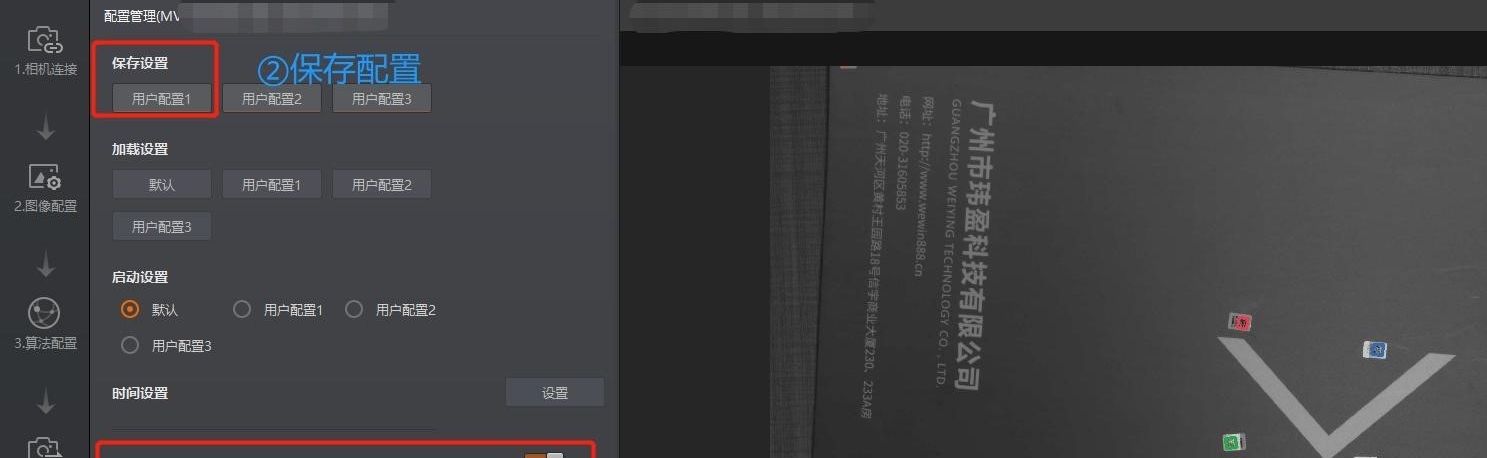
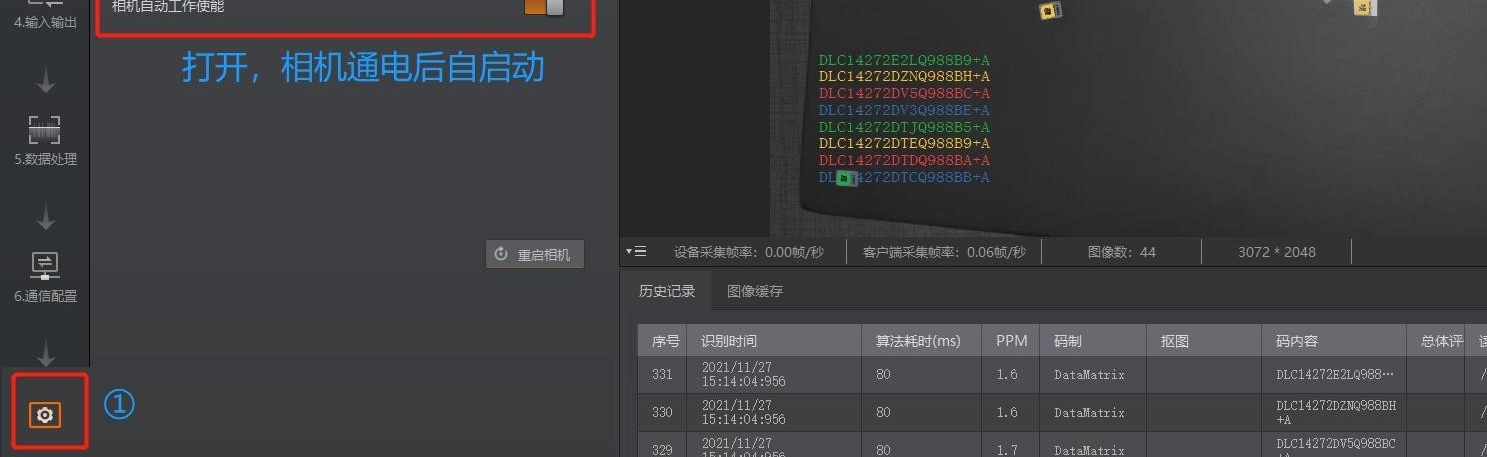
3、保存相机配置。点击通信配置,保存设备配置,把相机自动工作打开让相机通电自动启动。设置好后就可以离线工作,不用依赖电脑。



- 1

 探讨海康VisionMasterN点标定的内部原理2024-07-19
探讨海康VisionMasterN点标定的内部原理2024-07-19 关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
关于两起激光方案配置不合理引起的碰撞案例分析2024-07-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号