- 1030
- 0
- 分享
- 2022-11-22 19:51
在小车运行过程中,如果能够正确地把握小车的几何中心与运动中心的位置,那么就可以确保机器人运行的稳定性以及定位的精确性。由此可见,几何中心与运动中心是学习使用小车过程中绕不开的重要知识点。本文将以结构较为复杂的叉车和CTU为例,介绍并分析机器人的几何中心与运动中心。
1、 叉车
目前的叉车种类根据运行方式主要分为标准叉车和全向叉车。因为这两类叉车具有不同的运行方式,所以导致它们的几何中心与运动中心也不完全相同,故下面将分类阐述。
(1) 标准叉车
几何中心:在叉车的俯视图中,找到中心点(即矩形对角线的交点),该点即为几何中心。标准叉车的几何中心在运动过程中不发生变化。
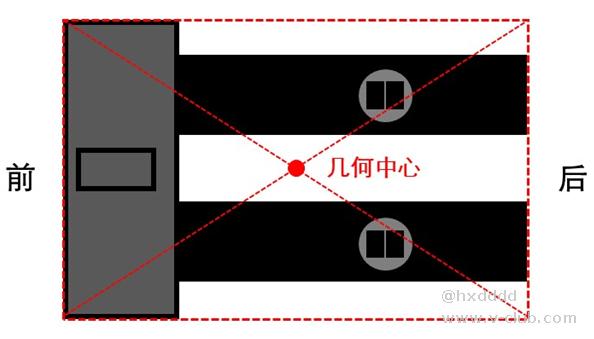
图1、标准叉车的几何中心
运动中心:若将叉车的俯视图看作以左下角为原点(0,0)的平面坐标系,x轴的正方向朝右,y轴的正方向朝上。假设叉车的整车长为L,整车宽为W,叉尖到承载轮的长度为l。又因为叉车的运动中心在自身的中轴线上,所以运动中心是中轴线和在点(L-l,0)上垂直于x轴的直线的交点,其坐标可以表示为(L-l,W/2)。标准叉车的运动中心在运动过程中不发生变化。
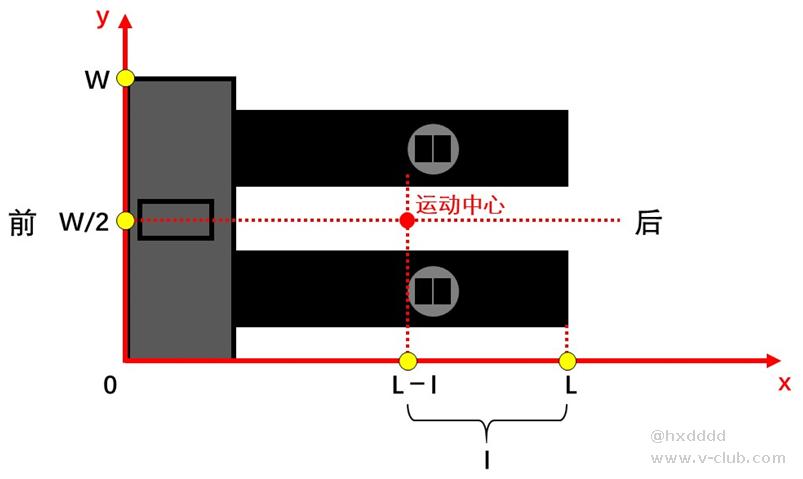
图2、标准叉车的运动中心
(2) 全向叉车
几何中心:与标准叉车一致。
运动中心:全向叉车在空载和负载的情况下,运动中心的确定方式各不相同,因此在这里将其分为两种情况分别介绍。
① 空载情况
全向叉车在空载情况下,车身中轴线上任意一点都可以作为运动中心,并非固定不变。
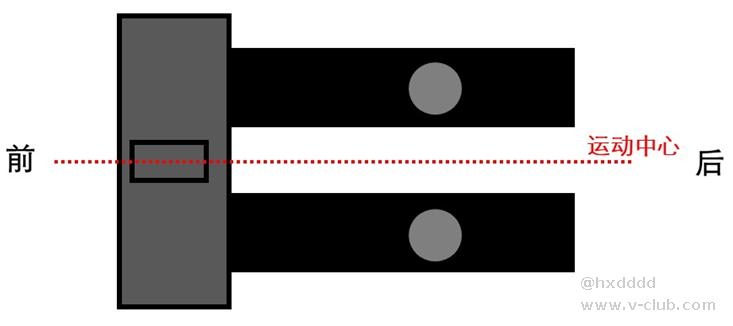
图3、全向叉车空载时运动中心所在线
② 负载情况
在全向叉车负载的情况下,运动中心为叉车车身与载具最小包络圆的圆心(若载具长度≤叉齿长度,载具宽度≤叉车整车宽度,那么最小包络圆即为叉车车身的最小包络圆,运动中心即为叉车车身最小包络圆的圆心)。因此,随着载具尺寸的变化,运动中心也会发生变化。
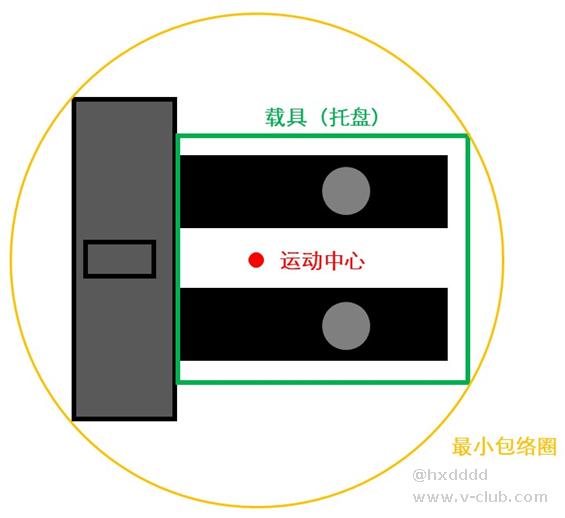
图4、载具长度>叉齿长度,载具宽度<车身宽度时的运动中心
2、 CTU
CTU作为料箱机器人,可以具备1个或多个仓位,但是几何中心与运动中心并不会随着仓位数量的变化而变化,因此下文将以多层CTU为例,对几何中心与运动中心进行分析。
多层CTU虽然结构复杂,但其几何中心与运动中心只需根据底盘来分析即可。所以,CTU的几何中心与运动中心均为其俯视图中的中心点(即矩形对角线的交点)。同时,在CTU运行过程中,几何中心与运动中心均保持不变。
![]()
图5、CTU的几何中心与运动中心
3、 总结
下表总结了上述小车的几何中心与运动中心是否会随着小车的运动而发生变化:
|
|
几何中心 |
运动中心 |
|
标准叉车 |
不变化 |
不变化 |
|
全向叉车 |
不变化 |
变化 |
|
CTU |
不变化 |
不变化 |

 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号