



用VM实现一些检测方案
14篇
- VM常见定位场景与方案设计
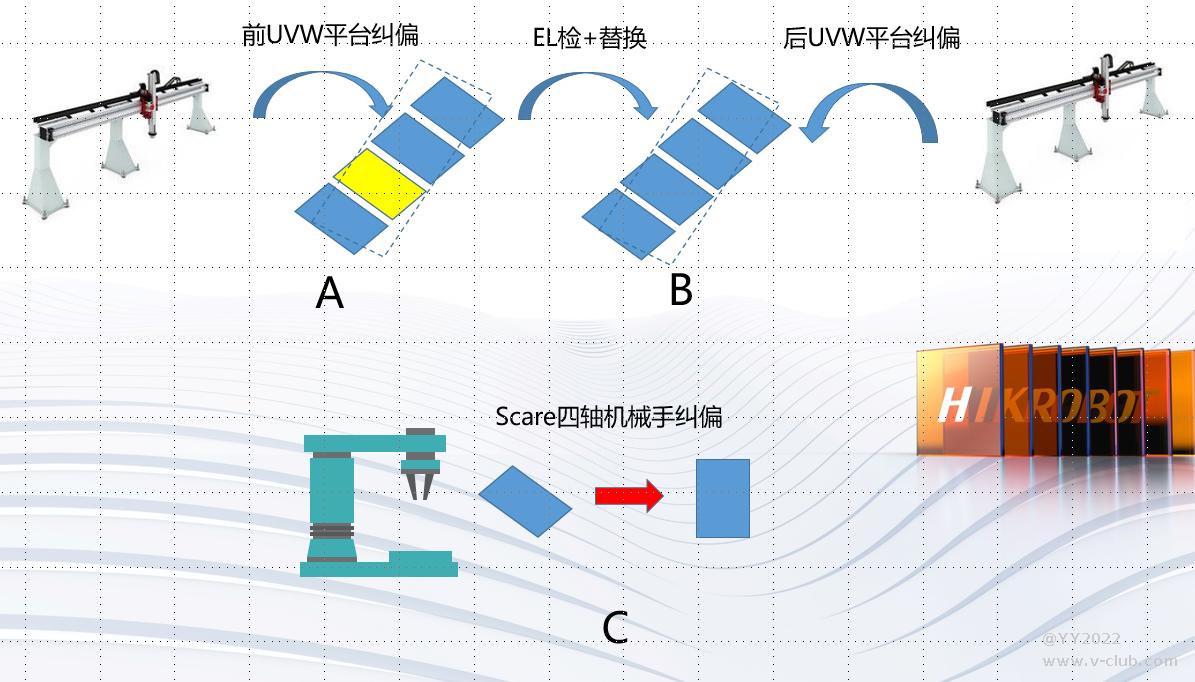
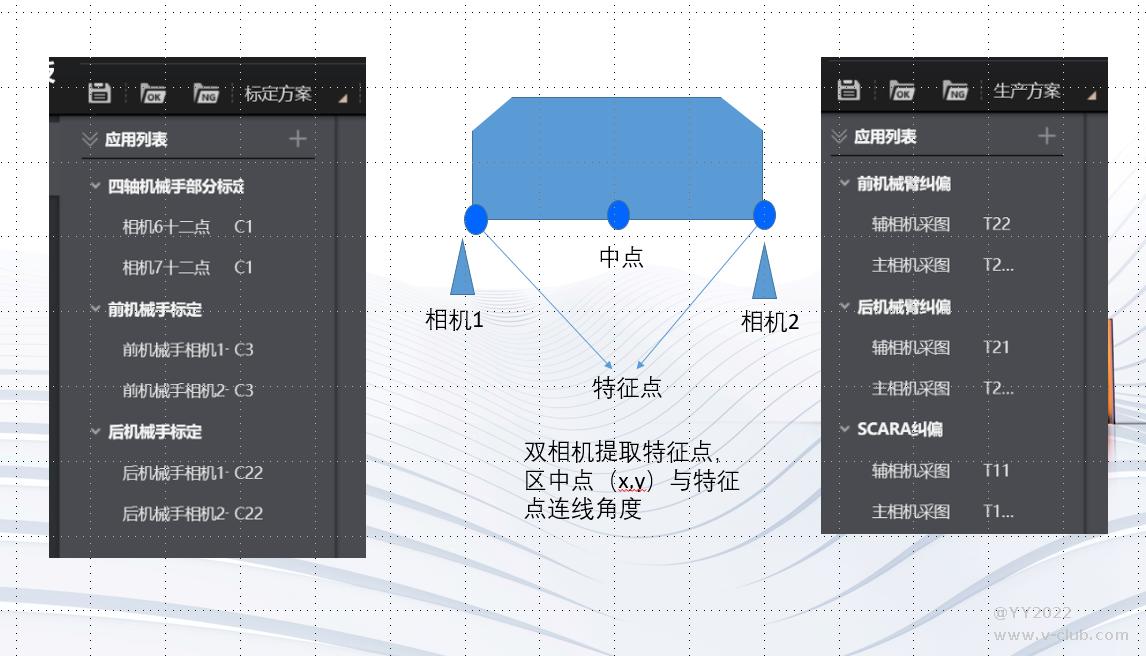
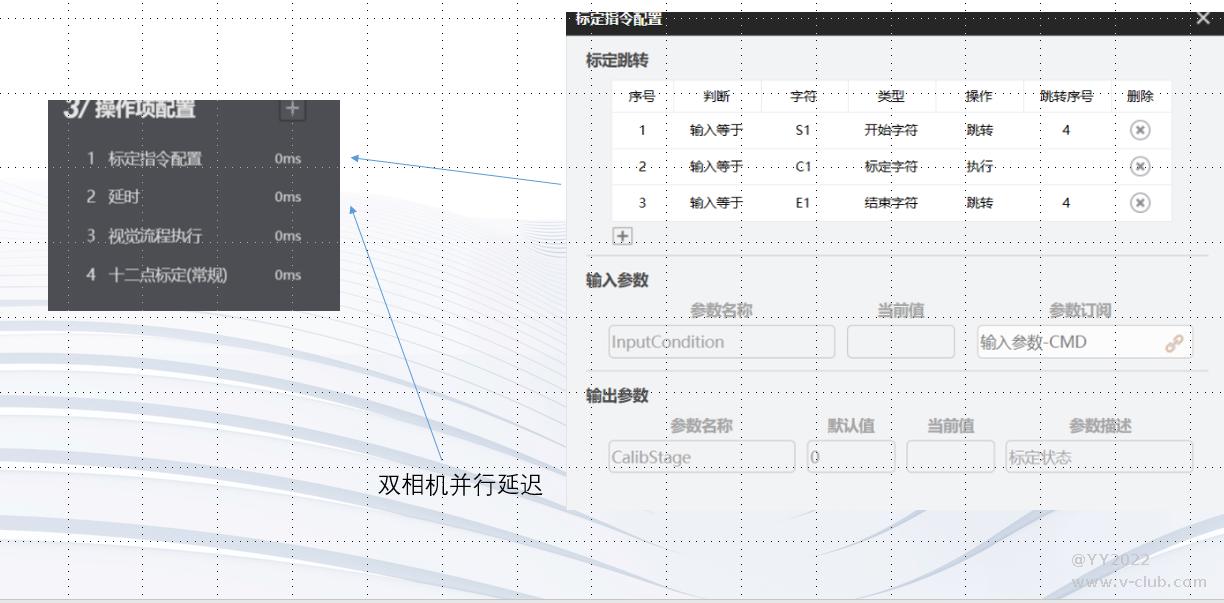
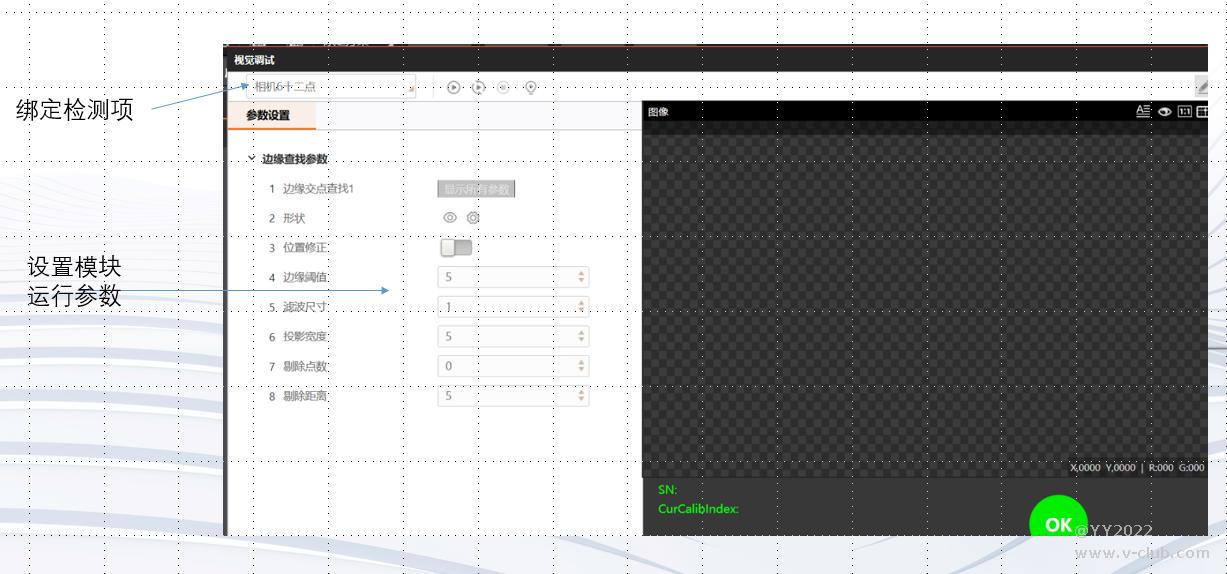
- 光伏串返机纠偏实现
- 用VM实现halcon例子--胶水检测
- 提问区问题。巧用形态学,数米粒。
- 用VM实现halcon例子--太阳能面板检测断线瑕疵,halcon中的例子(提问区看到的)
- 太阳能面板检测断线瑕疵(补充vm流程附件)
- VM重现经典halcon液位检测案例
- Halcon例题,液位检测。用的是43版本。在此感谢坛友勇的热心分享
- 浅试颜色识别模块3
- 浅试颜色识别模块2
- 浅试颜色识别模块
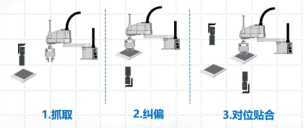
- 浅谈对海康视觉软件做定位/对位项目的想法
- 浅谈对海康视觉软件做定位/对位项目的想法二
- 浅谈对海康视觉软件做定位/对位项目的想法三
- 浅谈对海康视觉软件做定位/对位项目的想法四-----MODBUS-TCP通讯




 浙公网安备 33010802013223号
浙公网安备 33010802013223号