光伏行业|SC2000P智能相机拆码垛应用
- 2223
- 0
- 分享
- 2022-10-20 11:37
该项目应用在辅料上流水线过程,通过视觉引导机械臂抓取料盒上线,替代人工操作。
1、案例背景
(1)项目需求
- 通过智能相机引导机械臂拆码垛
- 保证位置定位准确,包括X、Y、角度,避免定位不准毁坏物件
- 对于码垛6个位置都需要进行定位抓取
(2)项目痛点
- 客户预算较低无法采用PCbase方案
- 现场码垛会存在X、Y、角度方向的偏移
- 现场码垛表面盖板需要去掉,匹配模型只能以边缘做纠正

图1 现场工位图
2、方案描述
(1)项目配单表

(2)方案示意图
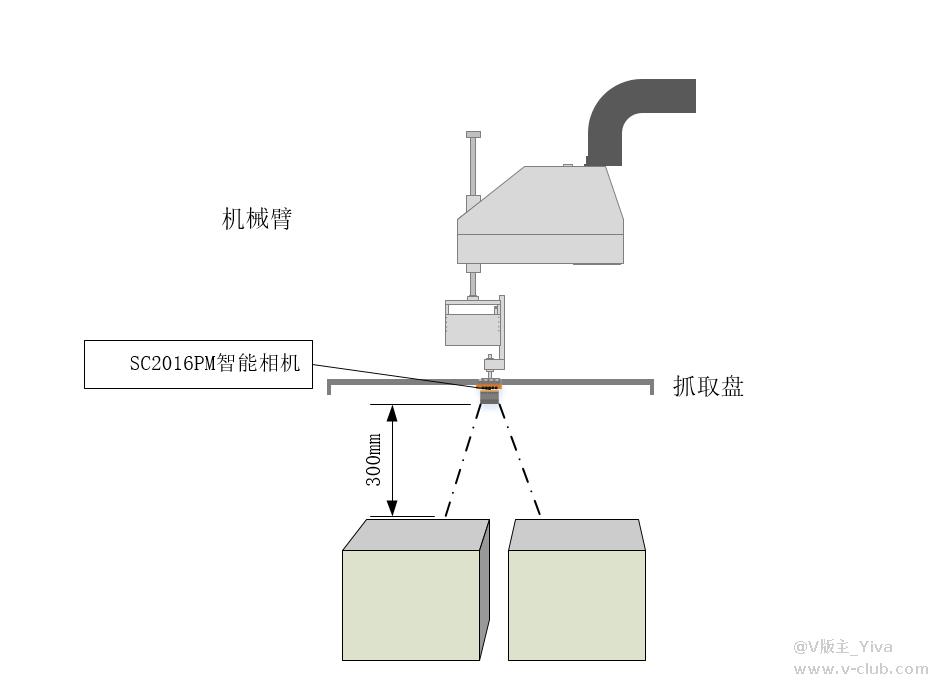
图2 方案架设示意图
(3)方案调试
- 标定:以箱体L型边缘作为标准进行12点标定得到图像坐标系与机械臂坐标系对应关系

- 示教:以箱体标准抓取姿态拍摄L型边缘,记录L型边缘坐标信息及角度作为标准位置信息
- 偏差运算:通过每次拍摄的L型边缘位置计算与标准位置的偏差值及角度,发送位置信息给机械臂,机械臂移动偏差及旋转角度到L型边缘上相对位置;通过旋转公式计算出机械臂移动到箱体中心的偏差距离,移动后可在中心抓取起箱体
- 多方案切换:由于一层6个位置,每个箱体位置不一,为提高抓取精度,构建6套方案进行对应,并且通过通信触发的方式切换对应位置的抓取方案
3、方案优势
- 通过应用智能相机进行拆码垛控制了客户现场部署成本和人工成本
- 智能相机配合机械臂完成拆码垛提高现场生产流程效率
- 整体方案算法耗时短,现场架设方便,不需要再部署工控机、光源等,场景适应性较高
- 向导式编辑方案简单易用,定位抓取拆码垛稳定
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
评论请先登录 登录
全部评论 0


相关阅读
 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号