- 857
- 0
- 分享
- 2022-09-29 11:45
由电机数学模型可知SPMSM的电磁转矩仅和定子电流的q轴分量iq及转子永磁体磁链Ψf有关,而且一般情况下,电机工作在正常区间时,不考虑永磁体磁场变化,此时转子永磁体磁链Ψf为常量,此时电机电磁转矩的大小仅和定子电流的q轴分量iq相关。因此,我们通过直接控制定子电流的q轴分量可以直接控制SPMSM产生的电磁转矩,和前述的有刷直流电机的控制方法完全相同。
永磁同步电机一般使用在伺服系统中,比如AGV的行走模块,此时需要实现电机转速的稳定可靠控制,因此,在设计SPMSM的控制系统时,一般采用串级控制的方式,即最外环为速度环,实现电机转速的闭环控制,最内环为电流环,实现电机电流(电磁转矩)的闭环控制,另外,在一些需要实现电机位置精确控制的场合,通常在速度环外环再增加一个位置环。所以,SPMSM控制时一般采用如图所示的结构形式,设计成串级控制的优点是:
1) 电流环实现电机绕组电流的闭环控制,可提高外环控制精度,有效防止电机过流;
2) 速度环实现电机转速的闭环控制,机器人行走模块一般控制电机运行在速度模式;
3) 位置环实现电机位置的精确控制,同时为了达到平滑控制到达指令位置的目的,需要对电机速度进行规划,机器人上层机构有些控制电机运行在位置模式。
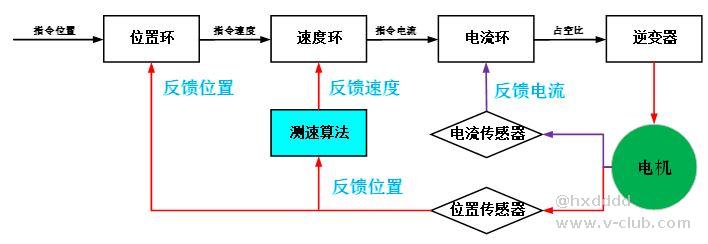
PMSM常用的控制结构图
图中的电流传感器一般采用高精度采样电阻或者霍尔型感应传感器,实现电机绕组电流的实时采样。位置传感器一般采用编码器,分为磁编码器和光电编码器,为了控制成本,AGV行业使用的传感器分辨率一般较低。电流和位置传感器可直接获取到反馈电流和反馈位置,直接输入电机控制算法库实现电流和位置的闭环控制。但是同样为了控制成本,一般不会直接安装昂贵的速度传感器直接获取电机转速,而是通过设计测速算法使用位置传感器的反馈间接获得电机转速。
电机控制中常用的测速算法有M法测速、T法测速和MT法测速。
M法测速又称为测角法,即在规定的时间间隔内,测量电机反馈编码器所产生的脉冲数增量来计算转速。设定电机旋转机械一周编码器产生的脉冲数增量为p,规定的测速时间间隔为T,某次测速时间间隔内采集的脉冲数增量为m,M法测速结果(r/min)为:

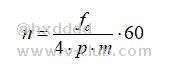
T法测速又称为定角测时法,即测量相邻两个脉冲之间的时间间隔来确定电机速度的方法。设定高频计时脉冲频率为fc,电机旋转机械一周编码器产生的脉冲数增量为p,某次测速相邻脉冲时间间隔内采集的计时脉冲数增量为m,此时由T法得到的电机转速(r/min)为:
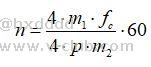
MT法测速兼容了M法适用于高速和T法适用于低速的优点,在规定的采样时间Ts内,同时检测电机反馈编码器脉冲数m1和高频时钟计数m2,检测周期由Tc周期完成之后的第一个编码器脉冲计数开始,高频时钟的频率为fc,则MT法得到的电机转速(r/min)为:
传统的电机速度环和电流环控制一般使用PI或PID控制器结构,以保证被控系统的稳定状态,并尽可能地使静态误差减小。PID控制器可根据经验对一个或多个增益值进行整定,并观察系统响应的变化情况,最终来确定合理的增益参数。PID控制器将对闭环控制环中的误差信号进行处理,并试图对被控量进行调节以获得期望的系统响应。系统中的速度控制环可以用以直接控制PWM占空比,也可以设置内部控制环的电流给定,从而来调节电机电流。被控参数可以是速度、电压、电流等可测量的系统参量。
如图所示为模拟PID控制系统的原理,可知,该系统由PID控制器和被控对象二者组成。

PID控制器结构图

 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号