- 7748
- 0
- 分享
- 2022-05-31 18:58
经过专家评审团的评审讨论后,最终有14个团队的课题成功入围,具体入围团队名单如下:

恭喜入围的团队!接下来将进入研究阶段,真正的较量即将开始,预祝大家获得好成绩!
如果您的课题没有入围,申报人员可以在收到通知后3天内修改课题并重新提交,我们将再次评审,并将结果告知与您!
活动进程:

你可能会问:
1.我该如何获取MV-EB435i相机和参考资料?
● 相机获取:产品借用协议将在课题申报入围后与入围通知一起发送至申请人邮箱,签署并回传借用协议即可获取相机
● SDK获取:拿到样机后扫描相机机身二维码即可获取。
● MV-EB435i相机介绍:请点击www.v-club.com/mv3d/basic
2. 我该提交哪些成果物?
● 成果物一:开源代码请自行上传至gitub或者gitee 平台,开源许可证(License)选择 MIT License,如图所示:

● 成果物二:在V社区RGB-D专区发表一篇成果物介绍或开发经验分享文章,文章中需要带上开源代码上传的路径。
3.指定课题小Tips:
● 课题一:OpenCV
编写程序,集成悉灵相机SDK实时获取数据,调用OpenCV的函数,实现深度图和RGB图像的窗口渲染、图像分割、滤波、旋转以及用于深度学习实时检测等功能。
● 课题二:Open3D
集成悉灵相机SDK实时获取数据,调用Open3D的相关函数,完成点云的三维可视化、渲染,以及基本的点云处理,如随机采样、法线估计、ROI裁剪、聚类、包围框计算等。
● 课题三:OpenNI
使用OpenNI获取悉灵相机的视频数据流,并将深度图映射转换到RGB图上进行显示。
● 课题四:PCL
集成悉灵相机SDK实时获取数据,调用PCL的相关函数,完成点云的可视化与渲染,以及一些基础的点云处理功能,如点云滤波、3D配准、平面拟合、点云分割等基础功能,有精力者还可以完成特定物体的识别、跟踪等高级功能
● 课题五:ROS
在ROS中集成悉灵相机,满足ROS的相关机制,获取并深度图和RGB图,并将深度图映射转换到RGB图上进行显示。
● 课题六:LabVIEW
封装悉灵相机SDK的API及一些自主开发的功能集为子VI,基于这些子VI连接相机,实时获取RGB图、深度图和点云图并渲染和保存本地,保存的图像具体格式不限定。
4.我要如何才能获奖?
● 评委组成:成果物评审团队由海康工程师和知名高校老师组成
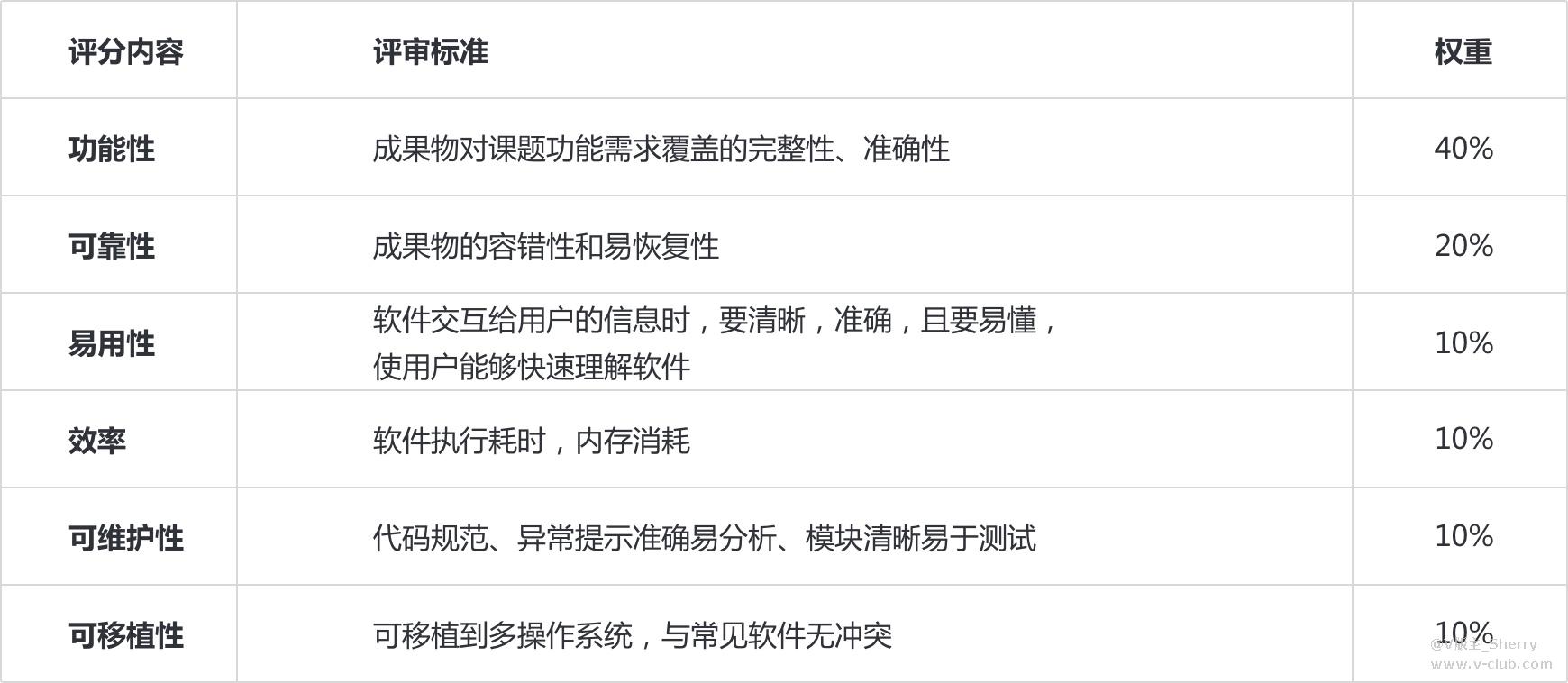
● 评选标准:
5.我会得到什么奖品?



特别提醒:
1. 活动过程中如有任何疑问,欢迎随时联系我们:v-club@hikrobotics.com
2. 此活动最终解释权归V社区所有



 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号