- 1978
- 0
- 分享
- 2022-03-28 19:36
背景介绍
全球AMR机器人市场取得了重大发展,产值和产量突飞猛进,全球AMR市场规模超40%的增长。随着工业4.0与智能制造以及智能物流的发展,AMR机器人的应用市场不断拓宽,迅猛发展的同时也对其实际应用的性能准确性和安全性提出了更高的要求。
AMR车的作业场景需室内外兼顾,需在复杂的室内外环境中拥有灵敏精准的环境感知功能,因此任何单一方案都无法完美满足它的避障需求。再考虑到前期研发投入与后期量产的成本把控需求,双目视觉方案走入AMR领域似乎是水到渠成的事。
目前,市面上主流的AMR机器人避障系统主流的有这几种,超声波、毫米波雷达避障、激光雷达避障、TOF光或者结构光测距避障以及本文介绍的主动双目避障方案。
不同避障方案的优缺点分析:
1. 超声波、毫米波雷达测距
优点:
l 技术相对成熟、安装集成实现简单、白天黑夜全天候使用
缺点:
l 晃动的树叶、草地、海绵避障效果不佳
l 多台AMR使用时易受到相互干扰
2. 激光雷达测距
优点:
l 探测相对距离远,精度高,白天黑夜全天候使用
缺点:
l 需要漫反射物体才能检测,镜面物体测距效果不好
l 不能在太阳光的主要能量波段工作,会相互干扰
l 单线激光传感器,只能给出一个平面距离值。
3. TOF光或结构光测距
优点:
l 类似阵面发射的多点激光,弥补单线雷达的不足,可以探测三维环境
l 探测精度高,深度图精准
缺点:
l 目前主流的TOF传感器探测量程比较短,只有2~6米以内
l 存在镜面反射、多路径反射以及互相干扰等问题
l 室外使用容易受到环境光干扰
4. 主动双目避障方案
优点:
l 功耗低、体积小、深度图与RGB图结果可融合
l 相机可以做到较高帧率,计算延时相对较低
l 室外太阳光下效果影响不大,夜间加补光灯可正常工作
缺点
l 探测精度为厘米级,不如激光和TOF等传感器精度
案例介绍
移动机器人目前的避障方案中,二维激光只能检测一个平面内的障碍物,无法进行立体避障,对于低矮的障碍物或者是悬空障碍物无法检测。同时ToF存在镜面反射、多路径反射以及干扰等问题,单目避障因为无法获取深度信息而存在较多的误检。本文介绍的双目避障可以解决多层次,大范围的障碍物检测的问题,尤其是对于其他传感器难以处理的低矮障碍物,双目避障能够进行很好的处理。

针对ARM双目避障应用,海康机器人MV-EB435i相机最适合此应用,如上图所示,由于此相机体积小巧,可以很轻易的集成安装在ARM小车前部区域,同时相机具有90°大广角视野,保证了足够的视野覆盖面积,可轻松应对来自小车前方和侧方向的避障扫描需求。
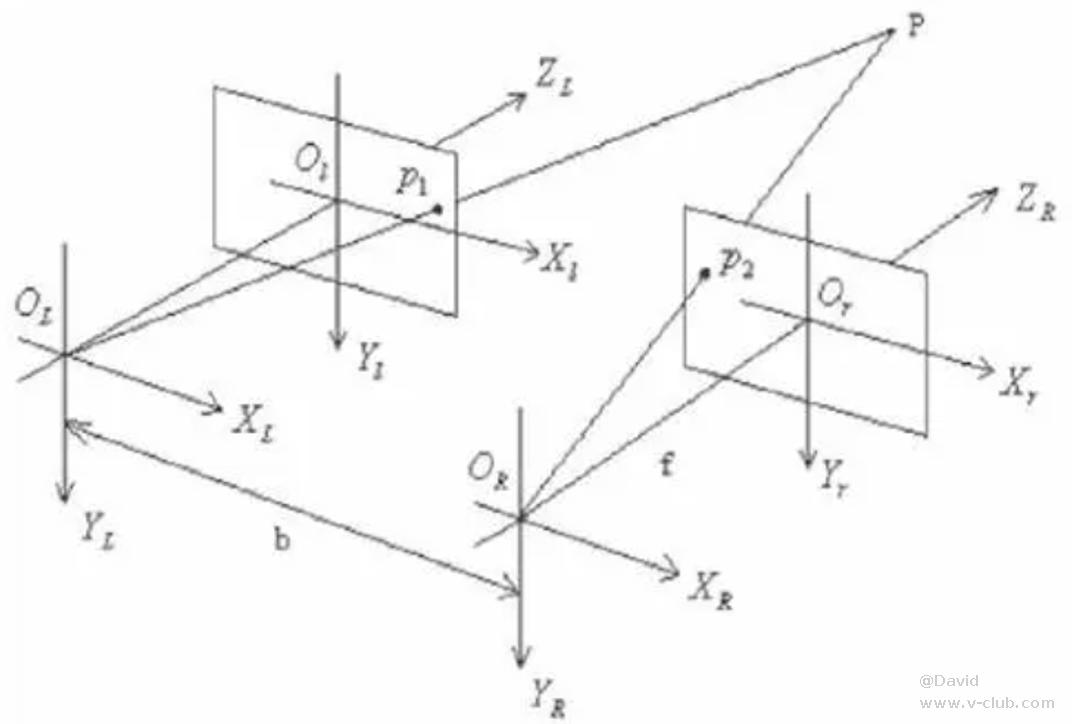
双目视觉的测距原理为三角测,两个深度摄像头的位置不同,就像人的两只眼睛。在真实的物理坐标系下,相同的P点在左右两个相机成像时其实是对应不同的像素位置,根据三角测距原理即可推算出这个点的距离。
基于双目避障的视觉方案有两个关键点,首先是障碍物的提取,即在相机图像中判断出障碍物的大小和位置信息,其次是判断出障碍物的距离信息也是深度信息。第一步是第二步的基础。判断出的目标可能是多个,在得到深度信息之后才可以标注出哪些目标判为障碍物目标。
在本方案中使用的MV-EB435i相机可同时输出RGB图及深度图,相机采用海康机器人MV3D SDK,提供跨平台支持,可轻松完成ARM小车双目避障的方案开发。




 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号