海螺8安防摄像头前盖定位引导
- 2455
- 0
- 分享
- 2021-12-22 17:18
定位引导是通过机器视觉技术获取被测对象位置信息,并引导机器人进行定位和组装等一系列操作。高质量安防摄像头的制造,前盖装配过程需要高精密的相机和机械臂控制。这种自动化装配方法,较人工装配效率更高、且不易出错。
1.1 方案背景
视觉功能要求:
1. 识别出前盖在TRAY盘中角度
2. 识别出前盖在TRAY盘中位置
3. 将识别出的角度、位置参数发送给机器人,配合机器人完成将前盖以固定角度、固定位置放入工装中
检测精度要求:
1. 角度:±0.05°
2. 位置:±0.2mm
选型思路:
① 视野确定:102.4 mm*153.6 mm
② 相机分辨率确定:根据算法精度(最少3个像素)和单像素精度(每个像素最少0.2mm),横向像素数量至少为:153.6/0.2*3=2304pixel,选用600万像素工业相机(3072×2048)
③ 工作距离214mm,带入公式(见镜头章节)即可得到最终镜头结果为12mm
1.2 方案架构
海螺8安防摄像头前盖定位引导系统主要由600万像素工业相机、FL为12mm的FA工业镜头,为了准确区分特征,减少背景的干扰,采用方形无影光源,使成像更均匀。海螺8整机通过机械臂传送,无现场干扰。
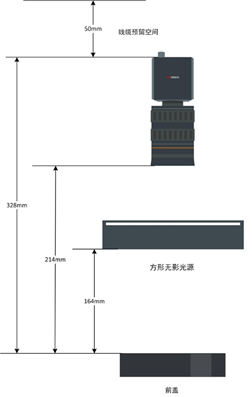
图1 方案架设示意图

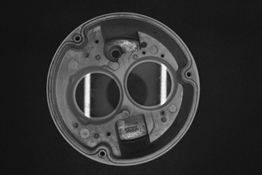
图2 打光方案成像效果
1.3 算法检测方案
定位引导方案主要使用定位工具,此方案使用高精度特征匹配工具进行定位,后续配合发送数据模块与通信连接功能与外部设备配合。
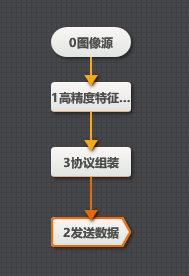
图3 检测流程

图4 定位模板建立
使用特征匹配工具中的模板配置建立定位模板,建立模板时注意将内部可能不稳定或有干扰的轮廓点使用掩膜遮盖。
使用协议组装或格式化工具,将检测物的坐标点位按协商好的格式封装。

图5 协议组装
发送数据中选择已建立好的通信连接,将上一步协议组装的结果进行发送。

图6 发送数据配置
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。

下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0


相关阅读
 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03
 浙公网安备 33010802013223号
浙公网安备 33010802013223号