
VM算法平台
N点标定时机械臂的坐标系与相机的坐标系是否需要保持在同一坐标系下
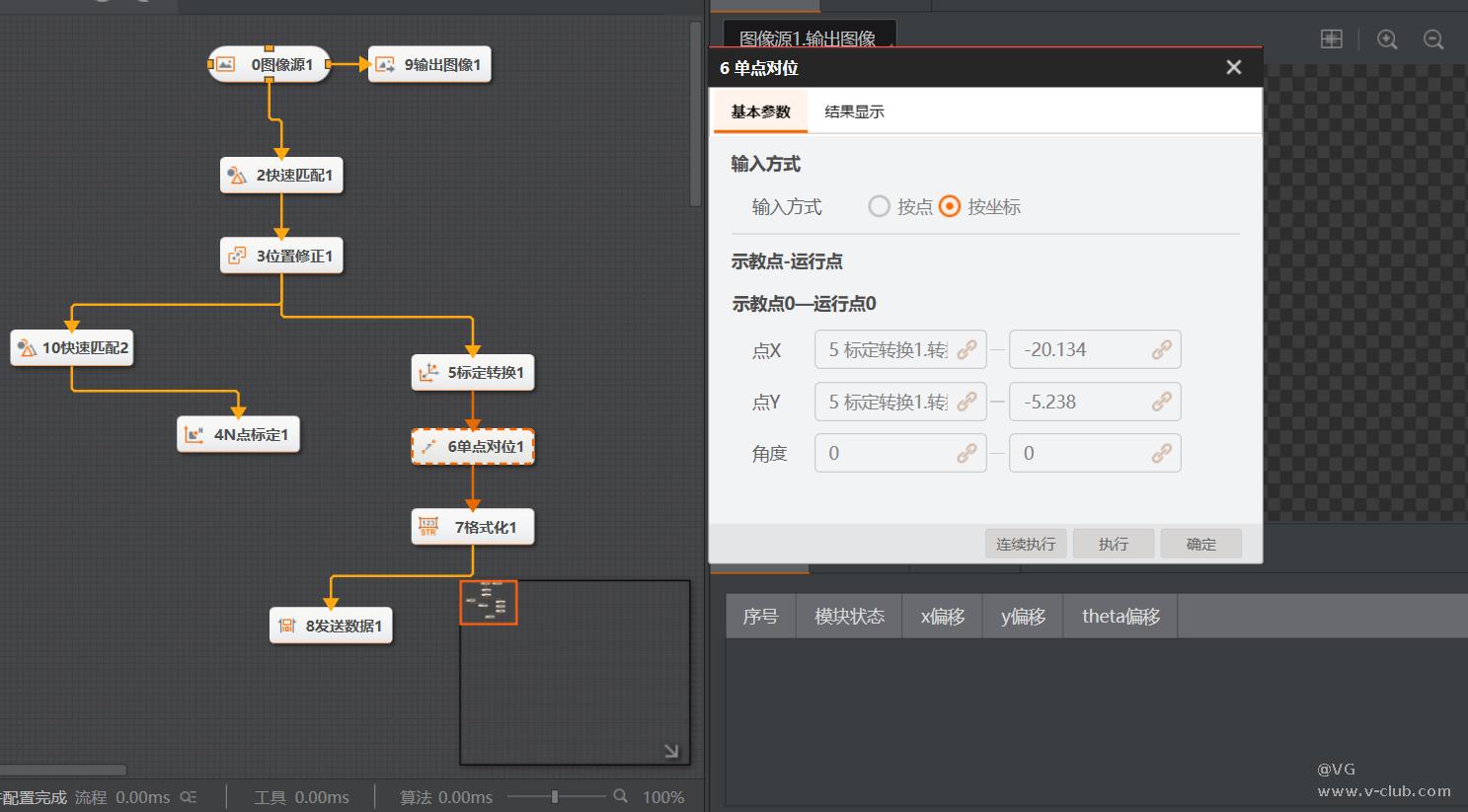
相机取图后的像素点坐标Y轴正反向是向下的,机械臂的X轴正方向与图片同向,Y轴向上,标定完成后,使用标定转换后用单点对位验证发现X,Y偏移发送给机械臂移动后出现移动方向相反的问题,把单点对位里示教点与运行点填的坐标交换就能正确移动,这是否是因为Y轴方向相反导致的?还有示教点填的坐标是机构位置,使得机构夹爪可以很好地对准物料,此时机构的物理坐标?还是示教完后保持物料不动机械手回到第五点拍照位,拍下此时物料图片经过标定转换出的匹配点物理坐标?
- 516
- 0
- 分享
全部回答1
您好,不需要保持坐标系方向一致。
如果想完成抓取功能的话,建议使用VM4.2单点抓取模块,VM4.2维护版将在五月底左右将会发布。
2022-05-23 11:35 未知地区
- |
- 评论 |
- 0
- 1

相关问答
相关阅读

探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布
2024-04-08 16:39:23 2024-03-21 14:07:03
2024-03-21 14:07:03 2024-04-12 16:03:57
2024-04-12 16:03:57 2024-04-03 17:19:44
2024-04-03 17:19:44 2024-04-15 16:57:44
2024-04-15 16:57:44
 浙公网安备 33010802013223号
浙公网安备 33010802013223号