叉车电梯多托场景实现配置
- 164
- 0
- 分享
- 2024-10-28 11:50
对叉车电梯多托场景业务实现配置进行解析
叉车电梯多托场景实现
一、适用范围
1.本文档仅适用于3.2或以上的3.X基线平台版本。
2.本文档场景涉及车型为叉车,适用于能给出多个放货位置的大货梯。
二、实现方法
1.根据电梯实际情况,在拓扑图中设置合理的交接点和叉车等待点,如图1-1所示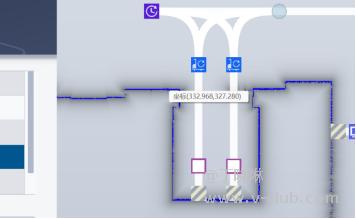
1-1
2.在电梯编辑设置中,根据拓扑点的设置或者实际的情况,修改电梯排列位置,按图1-1就需设置为两列一行,如图1-2
1-2
3.修改电梯配置中的任务阈值,有交接点就需要修改几个任务阈值,按图1-1就需将阈值设置为2,同时配置好电梯相关的交接点、等待点、释放点,如图1-3。
1-3
4.配置完电梯后,需修改cms系统参数配置的10118-电梯接驳点控制,将其修改为true-由第三方控制,如图1-4,这一步主要是用作cms解析任务时把通过wcs反馈哪个接驳位置空闲,如未更改,可能会出现多托任务前往同个接驳位置。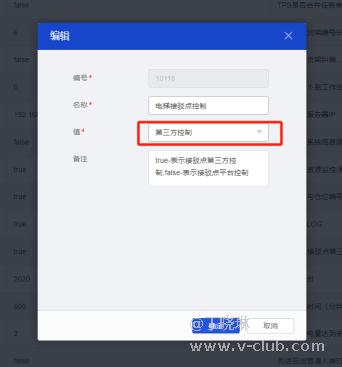
1-4
5.因基线wcs对于电梯的开门时间是有限制的,所以在配置完cms系统参数后,还需修改wcs的电梯等待时间,打开wcs能力集参数-设备配置-多托任务等待时间,对参数进行修改,其他参数维持默认配置,如图1-5
1-5
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0


相关阅读
 【保姆级教程】算法模块封装详解2024-10-17
【保姆级教程】算法模块封装详解2024-10-17 第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14
第三届“悉灵杯”基于MV-DT01SDU相机识别果蔬等数据集2024-10-14 [启智杯]赛事资料下载说明2024-10-29
[启智杯]赛事资料下载说明2024-10-29 一文带你入门RCS4.x【任务编排】(一)2024-10-28
一文带你入门RCS4.x【任务编排】(一)2024-10-28 【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14
【3D系列】2D-2D对极几何估计相机运动3D位姿2024-10-14
 浙公网安备 33010802013223号
浙公网安备 33010802013223号