- 4238
- 3
- 分享
- 2021-10-29 16:38
随着机器视觉技术的蓬勃发展,工业自动化检测方案也进一步升级。传统的2D图像分析技术主要是提取灰度图像的特征信息来测量物体的X_Y平面。物体的高度、厚度、曲率和体积等3D参数的检测往往受到限制。为了获得更丰富的物体信息,3D视觉技术近年来已成为业界关注的焦点。其中高精度3D线激光轮廓仪在3C行业的高精度测量中使用广泛。针对3C行业的应用需求,多家厂商推出针对3C行业3D激光轮廓仪,基于更大的视野范围,可有效降低手机中框等大视野范围的高精度检测方案复杂度,宽动态、高速率的图像处理算法可提升被测物材质和场景兼容性,为客户提供更好的在线、非接触式品质管控方案。本文以DP2305为例对高精度3D轮廓仪进行介绍。
性能指标
轮廓仪的性能指标包括扫描帧率、净距离、测量范围、重复精度、线性度和x轴分辨率z轴分辨率。扫描频率是指设备在单位时间内采集的图像数量;净距离是指被测物在测量范围内时,测量范围的上界与设备之间的距离,如下图所示;测量范围是设备可测量的深度范围;x轴分辨率是单条轮廓数据中相邻轮廓点的间距;z轴分辨率是测量范围中固定高度位置,测量范围上下界之间的高度差;Z轴重复精度是测量范围内对同一目标区域进行多次反复测量,测量结果的极差;Z轴线性度表示测量范围内被测物的测量值和真值的偏差。

图 1 测量范围
测量原理
3D激光轮廓仪的测量原理是在光平面打在被测物体上,如下图所示,当物体发生运动,线激光解除表面发生变化时,线激光在相机中的成像位置会发生变化。不同的激光线成像位置即表示物理坐标系下不同的高度,通过传感器标定可以得到图像坐标系和物理坐标系之间的映射关系。在进行测量时得到激光线的图像坐标即可得到物理点的实际坐标。

图 2 测量原理
产品功能
自动曝光:依据被测物表面的反射情况,可以通过自动曝光得到合适的曝光参数进行测量;
宽动态模式:相机支持宽动态图像处理模式,针对高反差材质的目标物,可精准提取三维轮廓,材质兼容性和场景适应性更强;

图 3 宽动态效果
数据填充:对测量的表面轮廓进行x/y方向的填充,得到更为完整的表面数据;
数据滤波:对测量数据进行均值/中值滤波,并且可以配置滤波窗口,得到更为稳定的测量数据;

图 4 滤波效果
系统标定:提供系统标定功能,得到测量系统坐标系与传感器坐标系之间的关系,支持进行静态标定、动态标定和旋转标定;


梯形标定块(平移系统) 圆锥标定块(旋转系统)
图 5 系统标定
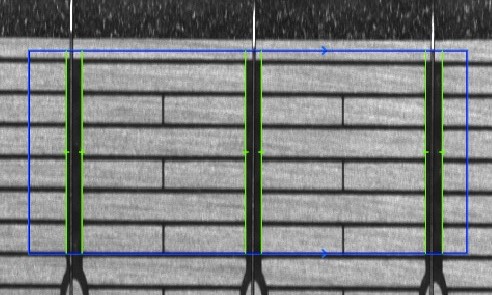
图像拼接:将轮廓数据/亮度数据拼接成点云图/深度图,用于进行3D测量;比如测量平面段差,测量平面度,尺寸的重复精度等。

图 6 拼接效果
使用案例
区域平整度测量,在深度图上划定测量区域,通过匹配算法定位测量区域,再使用测量功能测量目标区域的平整度。

图 7 测区域平整度测量
电池仓异物缺陷,在深度图上通过局部ROI的平面度进行电池仓异物缺陷检测,检测凸包以及凹坑等缺陷。

图 8 异物检测
螺钉孔位浮高测量,基于深度图进行尺寸的测量,选定螺钉孔位测量区域和底面区域进行段差测量,得到螺钉孔位的高度差。

图 9 螺钉空位浮高测量




- 1


 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号